Global Navigation Satellite System (GNSS)의 위치정확도는 위성 궤도 오차, 위성 시계 오차, 전리층 지연 등 다양한 오차 원인으로 인해 제한된다. 다수의 지상감시국에서 수신한 데이터를 처리하여 생성한 보정정보를 사용하면 이러한 오차의 의한 영향을 줄일 수 있다. 위성기반 보강시스템 (Satellite Based Augmentation System, SBAS)은 정지궤도 위성에서 보정정보를 실시간으로 전송하는 방식으로, Global Positioning System (GPS) 호환 신호를 통해 보정정보를 전송하므로 기존 GPS 수신기의 하드웨어를 크게 수정하지 않고도 SBAS 신호 수신 기능을 쉽게 구현할 수 있다. SBAS는 보정데이터 외에도 위치오차 예측값에 대한 무결성 정보를 제공하는데, 이는 궤도, 시계 및 전리층의 오차 공분산으로 구성된다. 이러한 공분산은 위치결정 과정 중 측정 가중치를 결정하고 오차한계를 추정하는데 사용된다. SBAS 사용자는 오차한계값이 설정값 이내에 들어오는지 확인하여 GNSS/SBAS 사용 여부를 결정할 수 있다.
GNSS 를 항공기의 운항 및 이착륙에 적용하면 값비싼 지상항행장비들을 대체할 수 있고, 유연한 비행경로 설정이 가능하다. 이러한 이유로 International Civilian Aeronautical Organization (ICAO)는 SBAS의 도입을 권고하였으며, 그에 따라 SBAS는 항공기 적용을 위해 주로 개발되어 왔다. 현재 세계 각국에서 SBAS를 운용 중인데, 미국의 Wide Area Augmentation System (WAAS), 유럽의 European Geostationary Navigation Overlay Service (EGNOS), 일본의 Multi-functional Satellite Augmentation System (MSAS) 및 인도의 GPS Aided GEO Augmented Navigation system (GAGAN) 등이 대표적이다. 중국의 BeiDou Satellite-Based Augmentation (BDSBAS), 러시아의 System for Differential Corrections and Monitoring (SDCM), 한국의 Korea Augmentation Satellite System (KASS) 등도 시험 운용 중이며, 다른 국가에서도 SBAS 개발이 시작되고 있다. Fig. 1은 전세계에서 운용 중이거나 개발 중인 SBAS 현황을 나타내고 있다.
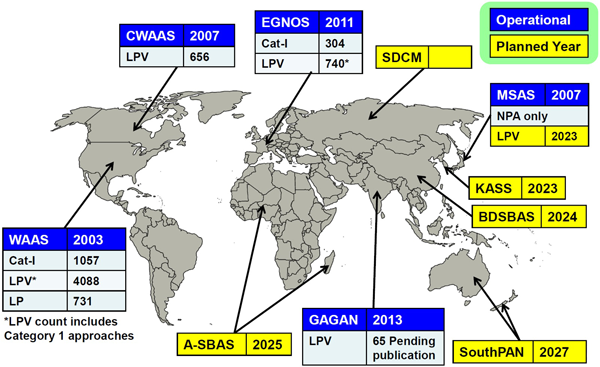
Fig. 1. Published SBAS procedures (SBAS IWG 2021).
1990년대 GPS 도입 초기에는 Selective Availability가 존재하여, 민간 사용자는 위치정확도가 100 m로 낮았고, 신호의 안정성이 부족하여 항공항법으로 사용하기에는 어려움이 있었다. 이를 극복하기 위하여, 지상감시국 데이터로부터 생성한 보정정보를 적용하여 위치정확도를 대폭 개선하고, 무결성정보를 적용하여 신뢰성을 보장하는 개념의 SBAS가 개발되었다. SBAS는 정지궤도에서 GPS L1 신호에 대한 보정정보를 전송하므로, GPS 수신기 사용자는 별도의 데이터 망이나 고가의 추가 하드웨어 없이도 SBAS의 전리층 보정정보를 수신할 수 있다. 이는, 외부 데이터 접속이 제한되는 항공항법에 적당한 방식이다.
GPS 도입 초기에 민간용으로 사용할 수 있는 신호가 L1 신호뿐이었기 때문에 전리층에 의한 영향을 최소화하기 위하여 전리층 보정정보를 SBAS에서 제공하였으나, 전리층 지연값 세기가 시간 및 공간에 대해 급변하는 전리층 폭풍 등에 대응하기에는 어려움이 있었다. 이후 GPS L5 신호가 도입되면서 일반 민간용 수신기도 이중주파수에 의한 전리층효과 제거가 가능해지게 되었다. 이에 따라 GPS 신호를 보강하는 SBAS도 이중주파수에 대한 대응이 필요하게 되었다. 한편, GPS 이외에 Galileo, BeiDou 등 다양한 GNSS가 등장하면서 이들을 결합하여 운용할 필요성이 증대되고, SBAS도 이에 대한 대응이 필요하게 되었다. Dual Frequency Multi Constellation (DFMC) SBAS는 이러한 GNSS 신기술을 SBAS에 반영하려는 시도로 현재 각국에서 활발히 개발되고 있다. 현재 운용 중인 대부분의 SBAS가 DFMC로의 전환을 준비하고 있다 (FAA 2023a).
전세계 SBAS 운용 현황에 관한 논문은 국내외에서도 다수 발간되었으나 (Sin et al. 2014, Yun 2015, Lee et al. 2016, Park et al. 2016, Son et al. 2020, SBAS IWG 2021, FAA 2023a), 시간 경과에 따른 변경사항 및 최신 기술을 반영하는 조사가 필요하다. 본 논문에서는 WAAS, EGNOS, MSAS, GAGAN 등 세계 각국의 SBAS 운용 현황과 시스템 성능개선을 위한 개발 진행 상황에 대해 살펴 보았다. SBAS의 주요 요소인 감시국, 제어국 의 구성 및 운용 현황을 조사하고 정지궤도위성 운용 현황 등에 대해 살펴 보았다. 2장에서는 SBAS의 항공기 적용을 위해 필요한 무결성 및 SBAS DFMC를 설명하였고, 3장에서는 세계 각국의 SBAS 시스템별 개발연혁, 서비스 시기 등을 조사하였다. 현재 SBAS는 DFMC로의 전환을 위한 연구, 개발 및 시험이 주요 현안인데, 이에 대한 각국의 개발계획 및 현황에 대해 살펴보고 정리하였다.
타 분야와 달리 항공항법에서는 항공기의 안전을 위하여 위치정보의 정확성뿐만 아니라 신뢰성이 보장되어야 하므로 ICAO에서는 항공기에 필요한 항법성능의 지표인 Required Navigation Performance (RNP)를 만족할 것을 요구하고 있다. RNP는 항공기 운항에 요구되는 성능지표로 비행단계에 따른 정확도 (Accuracy), 무결성 (Integrity), 연속성 (Continuity), 가용성 (Availability)에 대한 기준을 제시한다 (ICAO 2018b).
정확도는 측정 또는 추정된 위치나 시간이 실제값과 얼마나 일치하는지에 대한 정도를 나타낸다 (Luccio 2023). 이는 GNSS 항법시스템의 정확도 요구조건이 95%인 경우 추정된 위치가 실제 위치를 기준으로 95% 확률 범위 내에 존재해야 하는 것을 의미한다. 무결성은 항법시스템에 의해 제공된 정보를 얼마나 신뢰할 수 있는지에 대한 정도를 나타낸다. 이는 항법장비가 항법목적으로 신뢰할 수 없을 때 사용자에게 주어진 시간내에 경고해야 한다는 것을 의미한다 (Time to Alert). 무결성 위험도 (Integrity Risk)는 위치 오차가 경고 임계치를 초과 했을 때, 항법시스템이 검출하지 못한 경우의 확률로 정의된다 (Miss detection).
가용성은 특정한 신호가 사용자에게 제공되는 시간의 백분율을 의미하는데, 항공용 항법서비스에서는 중요한 요구조건이라고 할 수 있다. 연속성은 항법시스템이 의도된 운영 중에 계속해서 기능을 수행할 수 있는 능력을 의미하는데, 특히 특정 시스템에 대한 신뢰가 높을 때 연속성이 중요하다. 따라서 접근절차 중인 조종사에게는 항법성능의 연속성과 무결성이 매우 중요하다.
ICAO의 항공기 비행 단계에는 Table 1에 제시된 바와 같이 oceanic, en-route, terminal, NPA, APV-I, APV-II, CAT-1, CAT-II, CAT-III 등이 있다. 활주로 접근단계는 비정밀 접근과 정밀 접근 단계로 나뉠 수 있는데, 각 단계는 비행기의 순항 고도와 착륙할 시의 가시거리, 결심고도 등과 관계가 있다. Category-1 (CAT-1)의 경우 활주로에 설치된 장치로 측정한 가시거리 (활주로 가시거리)가 550 m 이상이다 (ICAO 2018b). CAT-1의 정확도 요구조건은 95%이며, 수평 16 m 및 수직 4~6 m 이내에 있어야 하는 확률이 95% 이상 이어야 한다 (CAT-1과 유사한 Localiser Performance with Vertical Guidance-200 (LPV-200)은 4 m). 한편, 무결성 위험도의 가능성은 2×10-7/h (approach)이며, 5,000,000회의 접근 비행에서 항법시스템 결함에 의해 임계값 초과 상태를 감지 못하는 경우가 1회 이하인 것을 의미한다. 연속성 위험도 (continuity risk)는 15초 동안에 시스템이 중단되거나 정보를 제공하지 못할 확률로 8×10-6/h보다 작아야 한다. Table 1은 항공항법 서비스수준 별 정확도, 무결성, 연속성 및 가용성 기준을 나타낸 것이다.
Table 1. Requirements for precision approach and takeoff and landing of aircraft (ICAO 2018b).
| Service level | Accuracy horizontal (m) | Accuracy vertical (m) | TTA (s) | Integrity (/h) (approach) | Continuity (/h) | POP | Availability |
| En-route En-route terminal RNP 0.1 APV-1 APV-1.5 (LPV) APV-2 CAT-1 (LPV-200) | 3700 740 72 16 16 16 16 | – – – 20 20 8 4 | 300 15 10 10 6 6 6 | 10-7 10-7 10-7 10-7 1 ~ 2×10-7 1 ~ 2×10-7 1 ~ 2×10-7 | 10-4 ~ 10-8 10-4 ~ 10-8 10-4 ~ 10-8 1 ~ 8×10-6 1 ~ 8×10-6 1 ~ 8×10-6 1 ~ 8×10-6 | 15s 15s 15s 15s | 0.99 ~ 0.99999 |
APV-1은 Horizontal Alert Limit (HAL) 40 m 및 Vertical Alert Limit (VAL) 50 m을 10초 이내에 경보할 수 있어야 하고, CAT-1은 HAL 40 m 및 VAL 10 m를 6초 이내에 경보할 수 있어야 한다. 현재 운용 중인 SBAS는 대부분 APV-I 수준의 서비스를 제공하고 있는데, 전리층 폭풍이나 전리층 급변 시에 발생하는 무결성 저하 및 이에 관련된 연속성 및 가용성 저하가 주요 문제이다. 현재 SBAS 운용 및 개발 국가 들은 이러한 전리층에 의한 SBAS 성능저하를 최소화하기 위해 노력하고 있다.
Fig. 2는 2027년까지 예상되는 SBAS 서비스 영역 및 가용성 지도를 나타내고 있다 (SBAS IWG 2021). 대한민국, 중국, 러시아, 오스트레일리아, 아프리카 등이 포함되어 있는 것을 알 수 있다. 가용성은 VAL=50 m 및 HAL=40 m에 근거한 것이며, 99% 기준 영역은 전세계의 25.95%로 남아메리카를 제외한 대부분의 육지를 포함하고 있다. 이 가용성 지도는 기존 L1 서비스에 근거한 것이며, 개발 중인 DFMC 적용시에는 가용성 범위가 훨씬 넓어지게 된다 (SBAS IWG 2021).
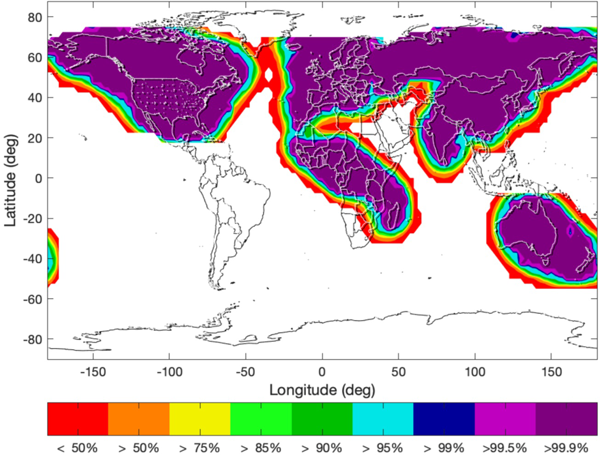
Fig. 2. Future approach capability with SBAS evolutions next 4 years (Availability with VAL= 50 m, HAL= 40 m) (SBAS IWG 2021).
기존 SBAS는 사용자가 GPS L1 C/A 코드 의사거리 정보만을 이용하는 것을 가정하기 때문에 전리층에 의한 의사거리신호 지연값을 보정하기 위하여 지상제어국에서 생성한 전리층 보정정보를 사용자에게 제공한다. 전리층 보정정보는 일정 간격 (5°~10°)의 가상 격자점에서의 수직 방향 전리층 지연오차 형태로 제공된다. 사용자는 자신의 위치를 중심으로 인접한 4개의 격자점을 선정한 후, 보간법을 사용하여 해당위치의 지연량을 계산한다. 각 격자점에서의 전리층 정보는 최대 5분 간격으로 제공되는데, 이는 전리층 폭풍 등에 의한 전리층 지연값 급변 시 정확한 정보를 제공하기 어렵다는 단점이 있다. 또한, 전리층 폭풍 시에는 국지적인 전리층 지연값 급변이 발생하여 보간법에 의해 계산된 전리층 지연값은 큰 오차를 유발하게 된다 (El-Arini et al. 2001). 이러한 전리층 폭풍에 의한 SBAS 위치정확도의 저하는 SBAS의 항공기 접근절차 적용을 막는 가장 큰 요인이다. 또한, 수직지연값 형태로 제공되는 전리층 지연값을 의사거리 관측값에 적용하기 위해서는 경사지연값으로 변환해야 하는데, 이 또한 상당한 오차를 유발한다.
전리층 보정정보의 한계를 극복하는 것은 이중주파수 신호를 사용하면 해결할 수 있는데, 이는 GPS 등 모든 GNSS에서 이중주파수 신호를 제공하는 이유이다. GPS는 L1과 L2 신호를 이용하여 전리층오차를 제거할 수 있는데, L2 신호의 취약성 및 군용목적으로 인해 민간용 L5 신호가 도입되었다. 이러한 L5 신호 도입은 SBAS 개발 초기에는 고려되지 않았기 때문에, 기존 SBAS는 GPS L1 전리층 보정정보만을 제공한다. DFMC SBAS는 GPS L1과 L5 신호의 동시 사용을 고려하여 개발되고 있는 차세대 SBAS이다. L1과 L5를 사용하면 전리층 보정정보 없이 전리층 지연오차를 제거할 수 있는데, 무결성 값 계산 등에 사용되는 각종 파라미터 또한 이에 맞춰서 수정되어야 한다. 예를 들어, L1과 L5 를 합성한 의사거리를 사용하는 경우 L1에 비해 송신기/수신기의 잡음 오차는 증가하게 된다. 즉, 기존 L1 C/A 기반 보정정보에서 전리층 보정정보만 제외하고 사용하는 것이 아니라, 무결성정보 계산 등을 위한 적절한 수정이 필요하다. 한편, 이중주파수 사용 시 위성 방향의 전리층 경사지연값을 직접 계산할 수 있으므로, 경사지연값 변환에 따른 오차도 제거할 수 있다.
1990년대 SBAS 개발 초기에는 GPS가 유일한 GNSS였으므로 GPS에 대한 보정정보만을 제공하였으나, 이후 전세계 각국에서 경쟁적으로 독자적인 GNSS를 구축하면서 SBAS에서도 이를 활용하는 것이 필요하게 되었다. 각국의 GNSS는 고유한 궤도를 갖고 있으므로, 북극/남극 등 특정 지역에서 GNSS별로 신호 수신에 많은 차이가 발생하는데, 다중 GNSS 사용 시에는 이러한 궤도 특성에 의한 GNSS 신호 부족을 해소할 수 있게 된다. 전체적인 위성의 개수가 늘어나므로 Dilution of Precision도 개선되는 효과가 있다. 특정 GNSS가 고장 발생 등으로 가용성이 급격히 저하되었을 때, 다른 GNSS를 사용하여 이를 해소하는 것도 가능하다. 이는 실시간 안정성 및 무결성이 중요시되는 항공기 응용 분야에서 매우 중요한 요소이다. 단, 다중 GNSS 사용 시 정확도 및 안정성 증가는 각각의 GNSS가 비슷한 수준의 정확도를 가지고 있을 경우이며, 특정 GNSS가 다른 GNSS보다 정확도가 낮을 경우 다중 GNSS 사용은 오히려 정확도 감소를 유발할 수도 있다. 이는 무결성에 직접적인 영향을 미치는 사항으로 이를 해소하기 위해서는 정교한 무결성 계산이 요구되며, 이는 DFMC SBAS 개발의 주요한 내용이다.
Fig. 3은 향후 DFMC SBAS 도입시 예상되는 SBAS 서비스 영역 및 가용성 (availability) 지도를 나타내고 있다 (SBAS IWG 2021). 가용성은 VAL= 50 m 및 HAL= 40 m에 근거한 것이며, 가용성 99%를 기준으로 할 때 서비스 가능한 면적은 전세계의 80.45%로 남아메리카 남부를 제외한 대부분의 육지와 해양을 포함하고 있다. DFMC 도입시 기존 L1 SBAS 서비스는 중지하는 것이 아니라 하위 호환성을 위해서 병행하게 된다. 이러한 하위 호환성을 유지하는 것도 DFMC SBAS 개발의 주요한 사항이다.
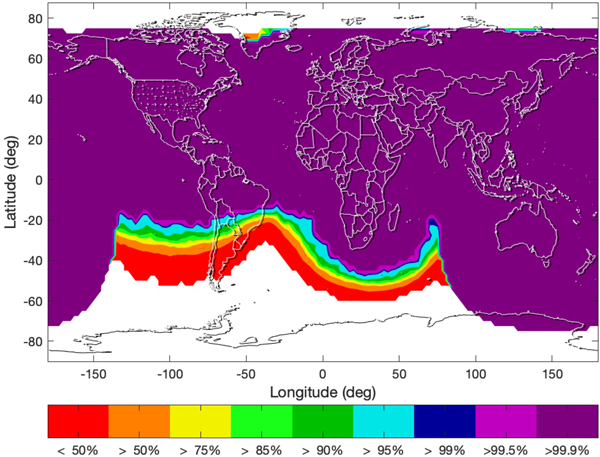
Fig. 3. Future approach capability with dual frequency / constellation (Availability with VAL= 50 m, HAL= 40 m) (SBAS IWG 2021).
미국에서 1992년부터 개발하여 운용중인 WAAS는 미국 본토에 SBAS 보정정보를 제공하는 것을 목표로 한다. 2003년 Initial Operating Capability (IOC) 이후 지속적인 개량을 거쳐 현재는 캐나다 및 멕시코 지역에도 보정정보를 제공하고 있다 (FAA 2023b). WAAS 시스템은 38개의 Wide Area Reference Stations (WRS)에서 수집한 GPS 정보를 3개의 WAAS Master Stations에서 처리하고, 이를 6개의 Ground Uplink Stations에서 3개의 정지궤도위성 (Geostationary Orbit, GEO)으로 전송한다 (FAA 2020, 2023a, Navipedia 2023d). 2개의 Operational Control Centers (OCC)에서 시스템 성능 감시 및 제어를 수행한다.
Fig. 4는 WRS의 분포를 나타내고 있는데, 캐나다와 멕시코 지역에서의 서비스를 위해 캐나다 (4개)와 멕시코 (5개)도 WRS가 설치되어 있는 것을 알 수 있다. 미국령 Puerto Rico에도 1개의 WRS가 설치되어 있다 (Johnson et al. 2019).

Fig. 4. WAAS WRS network (Johnson et al. 2019).
Table 2에 나타난 바와 같이 2023년 10월 현재 3대의 정지궤도위성 (GEO 5, 6 및 7)을 운용하고 있으며, WAAS 서비스 운용시작 시기는 각각 2018년 3월, 2019년 9월, 및 2022년 6월이다. 대략 10년 기간으로 위성채널 임대 계약을 체결하고 있으며, 위성 발사 후 WAAS 통합 및 운용까지는 상당한 시간이 소요되었음을 알 수 있다. 2028년 이후 GEO 5, 6 위성을 GEO 8, 9 위성으로 교체할 계획이다. WAAS 신호 도달 영역을 살펴보면, 알래스카까지 서비스를 제공하기 위해 전체적으로 미국 중심부 기준 서쪽 지역을 지향하고 있는 것을 알 수 있다 (FAA 2023b).
Table 2. WAAS GEO satellite operations information.
| ID | Satellite | Longitude (o) | PRN | Launch | WAAS service | Contract period |
| GEO5 GEO6 GEO7 | Eutelsat 117West (SatMex 9) SES-15 Intelsat Galaxy 30 | 117W 129W 125W | 131 133 135 | Mar. 2013 May 2017 Aug. 2020 | Mar. 2018 Jul. 2019 Jun. 2022 | ~2028 ~2029 |
2003년 1단계로 IOC가 완료되었으며 2008년 2단계로 LPV-200 운용조건을 충족하였다. 이후 2013년까지 3단계 개량사업을 진행하여 WAAS 서비스 제공영역을 캐나다와 멕시코까지 확장하였다. 4단계 사업은 Phase-4A와 Phase-4B로 구분되는데, 2019년까지 진행된 Phase-4A에서는 지구정지궤도 위성을 교체하고 알고리듬 성능개선 작업이 수행되었다. 2031년까지로 계획된 Phase-4B 사업에서는 DFMC와 Advanced Receiver Autonomous Integrity Monitoring (ARAIM)의 지원을 목표로 하고 있다.
Fig. 5는 WAAS Phase-4B 개발 일정을 나타내고 있는데, 2022년부터 시작되었으며 2031년에 완료할 계획이다 (Thompson 2021). 주요한 개발목표는 DFMC 기능으로 2027년까지 IOC를 달성하고 2028년 이후 Final Operation Capability (FOC)를 달성하는 것을 목표로 하고 있다. GEO 위성에서의 이중주파수 레인징 기능도 포함되며, Phase-4B 후반부에는 L2P(Y) 신호 대응 및 GEO 8 위성 전환 등이 포함되어 있다. 지상시스템 관련 사항은 Linux 기반 운영 시스템으로의 전환이 있다. ARAIM에 관련된 기술개발도 진행되는데, 다중 GNSS 기반 수평 ARAIM (H-ARAIM)을 지원하기 위한 요구조건 초안 마련과 이를 지원하기 위한 무결성정보의 추가가 포함된다.
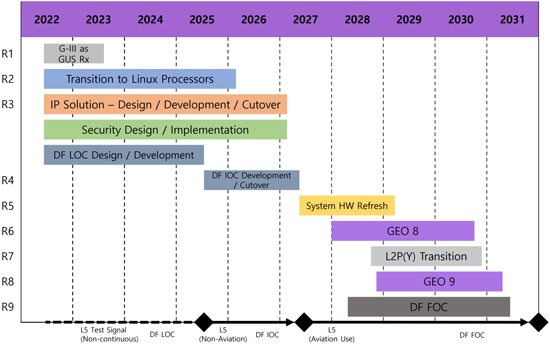
Fig. 5. WASS phase-4B development schedule (Thompson 2021).
EU에서 1992년부터 개발을 시작하여 운용중인 EGNOS는 유럽지역에 SBAS 보정정보를 제공하는 것을 목표로 한다. 2009년 Open Service (OS)를 시작하였으며, 2011년 Safety of Life Service (SoL)를 시작하였다. 2012년에는 EGNOS Data Access Service를 구축하였으며, 현재 APV-1/LPV-200 수준의 정밀접근절차를 제공하고 있다 (Navipedia 2023a).
EGNOS 시스템은 39개의 Ranging Integrity Monitoring Stations (RIMS)에서 수집한 GPS 정보를 2개의 Mission Control Centres (MCC)에서 처리하고, 이를 4개의 Navigation Land Earth Stations (NLES)에서 2개의 GEO 위성으로 전송한다 (EGNOS User Support 2023, Navipedia 2023a). Central Processing Facility (CPF)에서는 시스템 성능 감시 및 제어를 수행한다. EGNOS 시스템 사이의 데이터 전송은 EGNOS Wide Area Network (EWAN)를 통해 이루어진다.
Fig. 6은 EGNOS RIMS 감시국의 배치를 나타내고 있는데, 동유럽과 북부 아프리카 지역에도 설치되어 있는 것을 알 수 있다 (Bauer et al. 2019). 최근 3개의 감시국을 추가하여 총 42개의 RIMS를 운영할 계획인데, 추가된 감시국은 Kuusamo (핀란드), Kiev (우크라이나) 및 Al’Aqaba (요르단)이다.
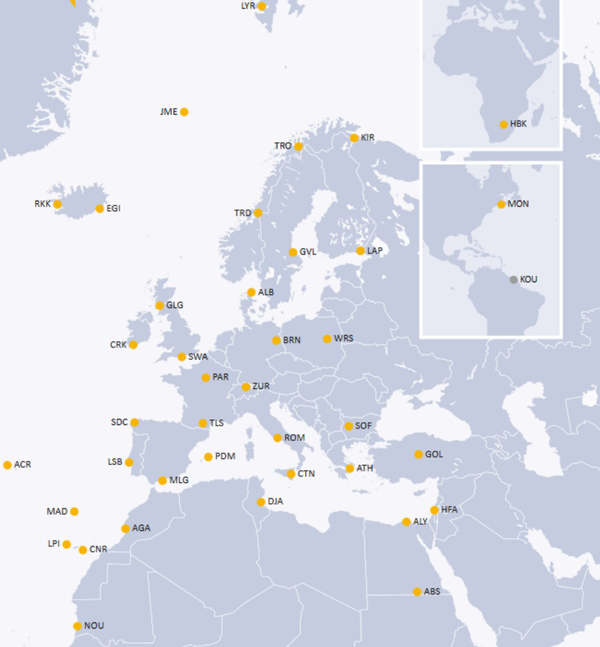
Fig. 6. EGNOS operational RIMS network (Bauer et al. 2019).
Table 3은 EGNOS GEO 위성정보를 나타내고 있는데, 2개의 정지궤도위성을 운용 중 (SES-5, Astra 5B)이며, 추가로 2대를 시험 및 백업용으로 운용 중이다 (EGNOS User Support 2023, Navipedia 2023a, Mozo 2021). E5WB는 시험모드로 운용 중이며, SES-5를 대체할 예정이다. Astra 5B와 SES-5 모두 DFMC 서비스를 위한 GPS L1/L5 및 Galileo E1/E5 신호 송출 기능을 가지고 있다. SES-5는 위성방송을 가정에서 직접 수신하는 Direct to Home의 성능향상을 고려하여 개발되었다.
Table 3. EGNOS GEO satellite operations information.
| ID | Satellite | Longitude (o) | PRN | Launch | EGNOS service | Misc. |
| GEO1 GEO2 GEO3 GEO4 | SES-5 Astra 5B Eutelsat 5 West B (E5WB) INMARSAT 4F2 | 5E 31.5E 5W 64E | 136 123 121 126 | Jul. 2012 Mar. 2014 Oct. 2019 Nov. 2005 | Sep. 2015 Jun. 2014 | DFMC, DTH DFMC Testing Backup / Testing |
EGNOS의 성능향상을 위한 연구개발이 지속적으로 수행되어 왔는데, 전리층 보정정보 및 무결성 성능향상에 관한 알고리듬 개발이 주요 내용이며, Fig. 7에 정리되어 있다. 2023년 현재 EGNOS V2.4.2B를 운용하고 있다. EGNOS는 2025년을 목표로 EGNOS V3를 개발하고 있는데, 기존 L1 Legacy 시스템의 성능향상과 DFMC L5 서비스 기능 추가를 목표로 하고 있다 (Lam et al. 2018, Braun et al. 2022). V3.1은 L1 서비스의 성능향상을 위한 개발로 기존 GPS 신호뿐만 아니라 Galileo 신호도 사용하여 전리층 보정정보를 생성하며, Kriging 기법 사용 및 Inter-Frequency Bias 결정 성능개선을 주요 내용으로 하고 있다. V3.2의 EGNOS DFMC는 GPS L1/L5와 Galileo E1/E5a에 대한 보정정보를 생성하는 것을 목표로 하며, Galileo 단독 모드로 동작하는 것도 고려하여 개발 중이다. 또한 DFMC를 이용하여 기존 LPV-200 대신 CAT-1 서비스를 제공하는 것을 목표로 하고 있다. 이외에 무결성성능 강화를 위한 시계오차 잔차정보 제공 및 Signal Quality Monitoring 기능 강화도 목표로 하고 있다.
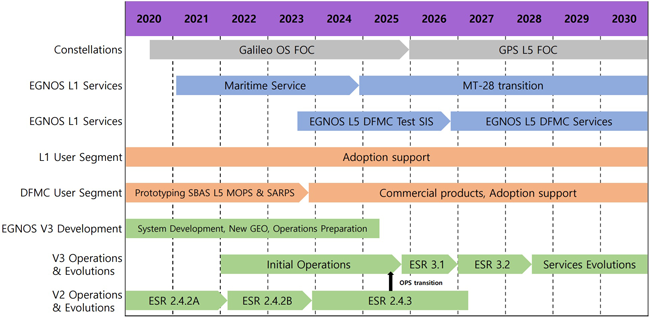
Fig. 7. EGNOS V3 service development schedule (EUSPA 2021).
일본에서 1993년부터 개발이 시작된 MSAS는 일본 본토에 SBAS 보정정보를 제공하는 것을 목표로 한다. 2000년부터 시험운영 및 서비스를 시작하려는 계획은 1999년 GEO 위성인 MTSAT-1의 발사실패로 지연되다가, 2005년 MTSAT-1R 위성의 발사로 본격적인 시험운영 (IOC)이 시작되었다. 두 번째 GEO 위성인 MTSAT-2 위성이 발사된 2007년에 FOC를 달성하였다.
MSAS 시스템 구성은 많은 변화가 있었는데, 초기에는 6개의 Ground Monitoring Stations (GMS)와 2개의 Monitor and Ranging Station에서 수집한 GPS 정보를 2개의 Master Control Station (MCS)에서 처리하고, 이를 2대의 정지궤도위성 MTSAT-1R과 MTSAT-2로 전송하였다. 2020년 이후에는 수명이 종료된 MTSAT 위성대신 QZS-3 GEO 위성 1대로 운영하고 있는데, 1대의 위성에서 2개의 GEO PRN 정보를 방송하는 방법을 사용하고 있다. Fig. 8은 MSAS 지상시스템 및 QZS-3 위성 구성을 나타내고 있는데 (NEC 2023), GMS는 13개로 대폭 증가하였으며, 신호송출국 (Uplink Station, US)도 3개로 증가하였다.
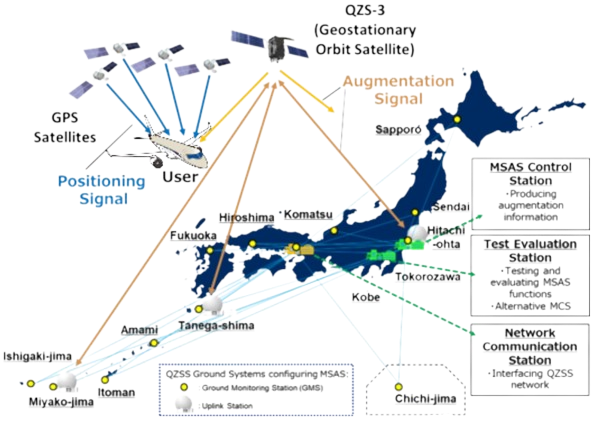
Fig. 8. MSAS system configuration (NEC 2023).
Fig. 9에 나타난 것과 같이 MSAS의 성능향상 개발은 MSAS V1~V4의 4단계로 나눠서 진행된다 (Saito 2019). V1은 2007년부터 2020년까지 진행된 단계로 6개의 GMS와 1~2대의 GEO 위성을 사용하는 단계이며, RNAV (En-route to RNP 0.3) 보정정보만을 제공해 왔다. 2020년부터 진행된 V2단계에서는, 13개의 GMS를 사용하고, GEO 위성을 QZSS 위성으로 대체하여 사용하고 있다. 2023년 현재 QZSS GEO 위성이 1대뿐이므로 MSAS 보정정보는 1대의 GEO 위성에서만 송출하고 있고, 이를 완전한 운용상태로 판단하기는 어렵다. 2023년 이후로는 V3 단계가 시작되는데, QZSS GEO 위성을 추가하여 2대 이상의 GEO 위성을 운용하고, 저위도 지역에서의 전리층 보정정보 성능을 향상시킨 알고리듬을 개발하여 LPV-200을 구현하는 것을 목표로 하고 있다. V4 단계는 DFMC에 의한 성능개선을 목표로 하는데, 2017년부터 개발이 시작되었다 (Sakai 2017). CAT-1 구현을 목표로 하며, QZSS GEO 뿐만 아니라 QZSS Inclined Geosynchronous Orbit (IGSO) 위성도 활용하는 것이 특징이다. 적도에 위치한 GEO 위성에 비해 IGSO 위성은 지구 북극지점까지 도달하므로 고위도 지역에서의 가용성이 향상된다 (Sakai 2018, Johnson et al. 2019). QZSS IGSO 위성에서 WAAS 신호를 제공하는 경우 북미 고위도 및 산악 지역에서 사용자의 가용성이 향상되며, 높은 경사각의 신호를 제공하여 도심 지역에서의 GNSS 가용성 향상에도 도움을 준다.
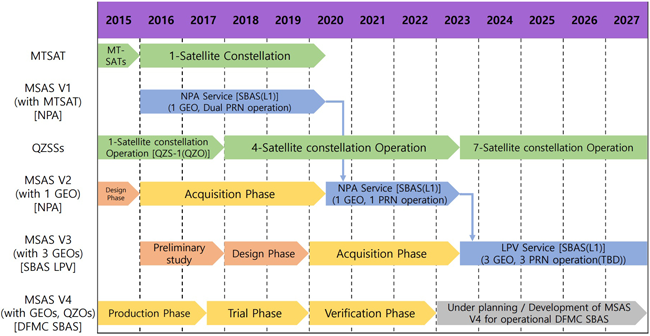
Fig. 9. MSAS performance improvement development schedule (Saito 2019).
인도에서 2001년부터 개발을 시작하여 운용중인 GAGAN은 2007년 Technology Demonstration System, 2009년 Initial Experimental Phase (IEP) 단계 이후, 2014년 Final Operational Phase (FOP) 단계를 완료하였다. GAGAN 시스템은 15개의 Indian Reference Stations (INRES)에서 수집된 GPS 데이터를 2개의 Indian Master Control Center (INMCC)에서 처리하여 보정정보를 생성한 후, 3개의 Indian Land Uplink Station (INLUS)을 통해 3대의 GEO 위성으로 송신한다.
Table 4는 GAGAN GEO 위성 배치를 나타내는데, 3대의 위성을 모두 발사한 후 상당시간이 지나 후속 위성의 배치가 필요한 상황이다 (Reddy 2022). 3대의 GEO 위성 위치와 GAGAN 신호도달 영역을 살펴보면, 유럽 및 동아시아까지 신호가 도달함을 알 수 있다 (Ramasubramanian 2016, Ramarao 2023).
Table 4. GAGAN GEO satellite operations information.
| Name | Satellite | Longitude (o) | PRN | Launch | Dry mass (kg) | Design life (years) |
| GSAT-8 GSAT-10 GSAT-15 | INSAT-4G INSAT INSAT | 55E 83E 93.5E | 127 128 132 | May 2011 Sep. 2012 Nov. 2015 | 1,426 1,498 1,440 | 12 15 12 |
인도는 지자기적도 근처에 위치하여 전리층 지연값의 세기 및 변화가 매우 큰 곳으로 일반적인 SBAS 전리층 보정방법으로는 전리층에 의한 영향을 효율적으로 제거하기가 어렵다. 이러한 이유로 GAGAN은 각각 300 km와 500 km에 위치한 2개의 전리층 shell을 사용하는 특수한 전리층 보정정보를 제공한다 (Shukla et al. 2009). 인도 전리층 모델 명칭은 ISRO GIVE Model – Multi Layer Data Fusion (IGM-MLDF)이다.
GAGAN은 2013년 해양을 포함한 인도 Flight Information Region 영역에서 RNP 0.1을 달성하였으며, 2015년 인도 육지영역에서 APV-1/1.5를 달성하였다 (Ganeshan et al. 2016, Ramasubramanian 2016, Dhital 2023, Navipedia 2023b). Fig. 10은 GAGAN 서비스 영역을 나타내고 있다. 단, APV-1은 전리층활동이 크지 않은 날 (nominal days)에만 적용 가능한 것으로, 이중 전리층 격자모델을 사용함에도 불구하고 전리층에 의한 성능저하를 최소화하지는 못했다. 2021년 이후 인도에 등록된 모든 항공기는 인도 민간항공국 Directorate General of Civil Aviation에서 인증한 GAGAN 수신기를 탑재하도록 의무화하는 방법으로 GAGAN 활용도를 높이기 위해 노력하고 있다. DFMC 구현을 위해 2025-2028년 운용을 목표로 하는 개발 계획을 수립하였으나 (ICAO 2018a), 다소 지연되고 있는 것으로 파악된다.
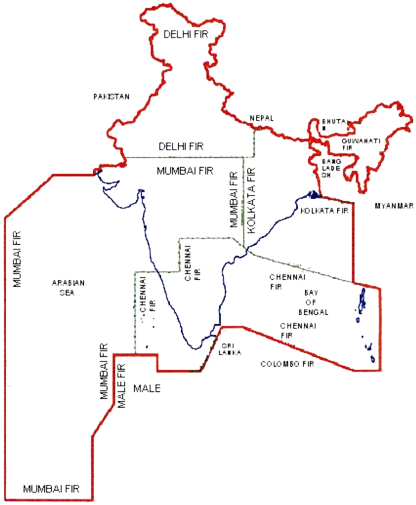
Fig. 10. GAGAN RNP 0.1 and APV-1/1.5 service area (Ramasubramanian 2016).
중국에서 개발 중인 SBAS는 원래 Satellite Navigation Augmentation System (SNAS)라는 명칭으로 불리다가 BDSBAS로 변경되었다. 중국 전역에 SBAS 보정정보를 제공하는 것을 목표로 하며, 2023년 IOC 및 2025년 FOC를 계획하고 있다 (ICAO 2020). Fig. 11은 BDSBAS의 30개 Monitoring Station 위치를 나타내고 있는데, 해안 및 국경지역에 많이 배치되어 있음을 알 수 있다. 지상시스템은 2개의 Data Processing Centers (DPC) 및 3개의 US로 구성된다. GEO 위성은 3대로 구성되어 있으며, 전체 시스템을 감시하고 관리/제어하는 Operation Control Center (OCC)는 1개로 구성되어 있다.

Fig. 11. BDSBAS monitoring stations (Gao et al. 2022).
Table 5는 BDSBAS GEO 위성정보를 나타내고 있는데, 자체 위성이 아닌 BDS의 GEO 위성을 사용하고 있다. BDSBAS GEO 위성의 신호송출 영역을 살펴 보면, BDS GEO 위성을 이용하기 때문에 비교적 균일한 간격으로 배치되어 있는 것을 알 수 있다 (Cheng et al. 2021, Navipedia 2023c, Chen 2023).
Table 5. BDSBAS GEO satellite operations information.
| Name | Satellite | Longitude (o) | PRN | Launch | Note |
| GEO-1 GSAT-10 GSAT-15 | BDS-3 BDS-3 BDS-3 | 140E 80E 110.5E | 130 144 143 | Nov. 2018 Mar. 2020 June 2020 | Testing |
Fig. 12는 BDSBAS의 개발일정을 나타내고 있는데, 2023년 IOC를 목표로 개발을 진행 중이다. 단주파수 보정정보를 제공하는 1단계에서는 GPS L1 C/A 보정정보를 제공하고 APV-1을 목표로 한다. 이중주파수 보정정보를 제공하는 2단계에서는 GPS L1 및 L5 보정정보 이외에 BDS B1C/B2a 보정정보도 제공하며 CAT-1을 목표로 한다 (Chen 2023).
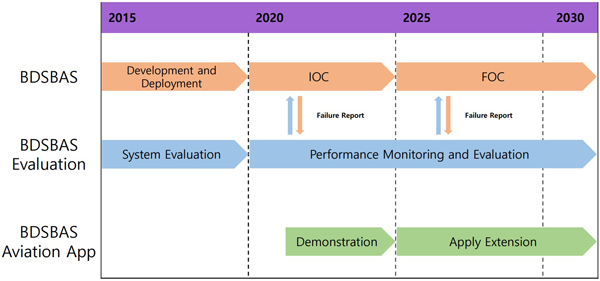
Fig. 12. BDSBAS development schedule (Xin 2019).
러시아는 GPS와 GLObal NAvigation Satellite System (GLONASS) 신호의 보정정보 및 무결성 정보를 제공하는 SDCM을 개발하고 있다 (Stupak 2013, Krasuski et al. 2022). SDCM의 24개의 Monitoring Points (MP)에서 위성항법신호를 감시하는데 이중 5개 MP는 해외에 설치되어 있다. 최종적으로 46개의 MP를 국내에 설치하고 7개의 MP를 해외에 설치하는 것을 목표로 하고 있다. 3개의 US, 1개의 Center of Global Monitoring 및 3대의 정지궤도 위성으로 구성된다. 각 위성은 GPS L1 주파수 신호만을 송출하고 PRN 141, 125 및 140을 사용한다.
정지궤도위성은 Luch-5 시리즈 위성을 사용하고 있는데, 향후 위성 4기로 확장 운영을 계획하고 있다. 러시아는 국토가 넓기 때문에 다른 SBAS에 비해 상대적으로 많은 정지궤도위성이 필요하다. GPS L1/L5 및 GLONASS L1/L3 보정정보 제공이 목표이며, 러시아 전지역에 최소 1개 위성의 보정정보 신호를 제공하고 러시아 중부지역은 2개 위성에 의한 신호를 제공하게 된다. 러시아 지역에 LPV-200 서비스를 제공하는 것을 목표로 하고 있는데, 일반 SBAS 보정정보 이외에 cm 수준의 Precise Point Positioning (PPP) 서비스를 제공하는 것도 계획하고 있다. Fig. 13은 SDCM의 전리층 격자점을 나타내고 있는데 (SDCM 2023), 유럽 대부분과 알래스카 지역까지 포함하는 매우 넓은 영역에 정보를 제공하는 것을 알 수 있다.
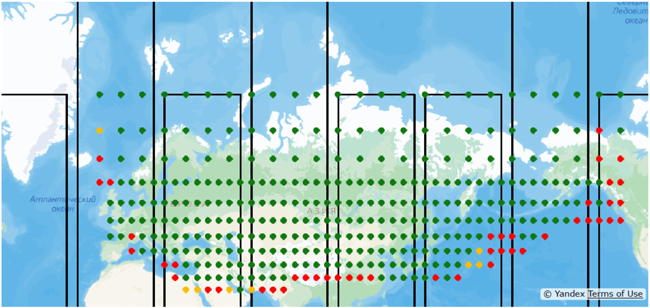
Fig. 13. SDCM ionospheric grids (SDCM 2023).