Jae Hoon Son1, Sang Heon Oh2, Dong-Hwan Hwang1†
1Department of Electronics Engineering, Chungnam National University, Daejeon 34134, Korea
2Advanced Technology Laboratory, Microinfinity Co., Ltd., Daejeon 34012, Korea
†Corresponding Author: E-mail, dhhwang@cnu.ac.kr Tel: +82-42-821-5670 Fax: +82-42-823-5436
Citation: Son, J. H., Oh, S. H., & Hwang, D.-H., 2024, Simulator Design Using a General Purpose PC and Off-The-Shelf Interface Boards for GNSS/INS Integrated Navigation System, Journal of Positioning, Navigation, and Timing, 13, 93-102.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 March, Volume 13, Issue 1, pages 93-102. https://doi.org/10.11003/JPNT.2024.13.1.93
Received on Jan 15, 2024, Revised on Jan 29, 2024, Accepted on Feb 05, 2024, Published on Mar 15, 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Global Navigation Satellite System (GNSS)/Inertial Navigation System (INS) integrated navigation systems provide highly accurate and reliable navigation solutions and are widely used as civil and military navigation systems. In order to facilitate the GNSS/INS integrated navigation system development task, a simulator can be used to provide inputs for the GNSS/INS integrated navigation system. In this paper, a simulator design using general-purpose Personal Computer (PC) and Off-The-Shelf (OTS) interface boards for a GNSS/INS integrated navigation system is proposed and implementation results are presented. Requirements of the GNSS/INS integrated navigation system simulator are presented and a design method that satisfies the requirements is described. In order to show the usefulness of the proposed design method, a simulator using a general-purpose PC and OTS interface boards for the GPS/INS integrated navigation system are implemented and verified. The implementation results show that the simulator designed by the proposed method generates the GPS L1 C/A signal and IMU data without any problems.
simulator, GNSS, INS, interface board
Global Navigation Satellite System (GNSS)와 Inertial Navigation System (INS)를 통합하면, 안정적이고 신뢰성 있는 항법 결과를 제공할 수 있다 (Titterton & Weston 2004, Farrell 2008, Groves 2013, Noureldin et al. 2013). 미국의 무인기인 Predator, Global Hawk는 Global Positioning System (GPS)/INS 통합항법 시스템을 항법 시스템으로 채택하여 운용하고 있으며, 미국의 항공 우주 기업인 Honeywell 사에서는 Embedded GPS/INS (EGI)를 출시하고 있다 (Loegering 1999, Honeywell 2022, Valdes & Bowie 2023). GNSS/INS 통합항법 시스템을 개발하려면 탑재 실험을 수행해야 하는데, 실험으로부터 실시간 GNSS 신호와 Inertial Measurement Unit (IMU) 데이터를 얻는 대신에 시뮬레이터를 이용하여 신호와 데이터를 생성하면, 개발 작업을 단순화하고 효율성을 향상시킬 수 있다 (Peteovello & Curran 2017). GNSS/INS 통합항법 시스템의 시뮬레이터는 GNSS 신호와 IMU 데이터를 제공하며, 항법 위성과 관성센서의 발전에 따라 GNSS 수신기, IMU, INS와 함께 지속적으로 발전하고 있다 (Peteovello & Curran 2017).
최초의 항법 위성 시스템은 1964년에 미국 해군에서 운용한 Transit이며 (Bonnor 2012), 이후 1960년대 중반에 Timation과 System 621B Program에서 Navstar GPS가 소개되었다 (Bonnor 2012). 1995년 미국 GPS의 Full Operational Capability (FOC) 이후로 본격적으로 GNSS에 관한 연구가 수행되고 있으며, 러시아의 GLObal NAvigation Satellite System (GLONASS), 중국의 BeiDou Navigation Satellite System (BDS)도 각각 2011년과 2020년의 FOC 이후 항법을 위한 신호를 제공하고 있다 (Bonnor 2012). 한편, 서비스 대상이 지구 전역이 아닌 특정 지역인 일본의 Quasi-Zenith Satellite System (QZSS), 인도의 Navigation Indian Constellation (NavIC)도 운용되고 있다 (Bonnor 2012). 이러한 추세에 따라 우리나라도 2035년 FOC를 목표로 Korean Positioning System (KPS)을 구축하고 있다 (Lee et al. 2021).
위성항법 시스템의 운용 초기에는 크기가 크며, 아날로그 및 디지털 회로로 구성된 하드웨어로 수신기를 구현하였으나, 반도체 및 컴퓨터 기술의 발전에 따라 수신기의 크기가 작아지고, 성능이 크게 향상되었으며 (Akos et al. 2022), 1996년에는 Software Defined Radio (SDR) 개념을 최초로 GNSS 수신기 설계에 도입하였다 (Akos & Braasch 1996, Akos 1997). 초기의 GNSS SDR은 CPU 기반으로 구현하였으나, GNSS가 다중 주파수 (multi-frequency)를 가진 다중 위성군 (multi-constellation)으로 운용됨에 따라 여러 종류의 항법 위성을 모두 이용하는 다중 위성 항법을 수행하여 항법 정확도와 GNSS의 가용성을 높이기 시작하였다 (Jo et al. 2004). 2016년도 이후에는 이를 위하여 Graphic Processing Unit (GPU)의 병렬 처리 기능을 이용한 SDR에 대한 연구가 수행되었다 (Park & Um 2016, Park et al. 2018).
GNSS 수신기는 항법 해 계산부, 신호 처리부, Radio Frequency (RF) front-end로 나눌 수 있는데, 사용 목적에 따라 각각 다른 GNSS 시뮬레이터를 사용하면 상용 수신기부터 GNSS SDR, 항법 해 계산 알고리즘까지 각각에 대한 성능을 확인할 수 있다 (Peteovello & Curran 2017). 이러한 목적으로 시뮬레이터는 항법 해 계산부의 입력을 생성하는 Measurement 단위 시뮬레이터, 신호 처리부의 입력을 생성하는 Intermediate Frequency (IF) 단위 시뮬레이터, RF-front end의 입력을 생성하는 RF 단위 시뮬레이터로 나눌 수 있다 (Peteovello & Curran 2017).
대부분의 측정치 단위 시뮬레이터는 Matlab 기반으로 구현되었으며, GPSoft LLC 사에서는 SATNAV Toolbox 3.0, L3NAV Systems 사의 GPS Toolbox 5, European Space Agency (ESA)의 Galileo Service Volume Simulator 등이 여기에 속한다 (Peteovello & Curran 2017).
IF 단위 시뮬레이터는 SDR과 비슷하게 소프트웨어만으로 구성하거나 Field-Programmable Gate Array (FPGA)와 소프트웨어를 이용하여 구성하기도 한다 (Peteovello & Curran 2017). 캐나다의 Calgary 대학은 2003년도에 소프트웨어만으로 구성한 IF 신호 생성기를 소개하고, SDR을 이용하여 검증한 결과를 발표하였다 (Dong 2003, Dong et al. 2004). 충남대에서는 소프트웨어 기반의 다중 채널 GNSS IF 신호 생성기를 개발하고, 이를 이용하여 생성한 GPS L1 C/A IF 신호를 NordNAV 사의 GPS SDR로 검증한 결과를 발표하였다 (Lim et al. 2008). 건국대학교에서는 GPU 2개를 이용하여 GNSS IF 신호를 생성하였으며, 생성한 신호를 NovAtel 사의 OEM-V3 수신기를 이용하여 검토한 결과를 발표하였다 (Im & Jee 2014). 여러 회사에서도 IF 단위 시뮬레이터를 출시하고 있는데, Navsys 사는 소프트웨어만으로 구성한 Matlab 기반의 GNSS Signal Architect Simulator Software를 소개하였다 (Peteovello & Curran 2017). M3 System 사의 GNSS Test Platform과 RACELOGIC 사의 LabSat 3 Simulator는 FPGA와 CPU를 이용하여 구현한 IF 단위 시뮬레이터를 소개하였다 (Peteovello & Curran 2017).
RF 단위 시뮬레이터로 Spirent 사는 GSS9000, Spectracom 사는 GSG-6 Series, Rohde and Schwarz 사는 SMZV100A Vector Signal Generator, IFEN 사는 NAV-NCS를 출시하였다 (Peteovello & Curran 2017). 2021년도에는 Orolia 사에서 GPU를 이용하여 수백개의 GNSS RF 신호를 실시간으로 생성하는 GSG-8 Advanced GNSS Simulator를 발표하였다 (Orolia 2021).
INS 시뮬레이터로 CAST NAVIGATION 사에서는 H-764G, HG1900, LN-200과 같이 여러 등급의 IMU의 출력을 제공하며, Synchronous Data Link Control (SDLC), RS-422, STARNAG 4572와 같은 출력 인터페이스를 가진 INS Simulation Systems를 출시하였다 (CAST NAVIGATION 2023). Spirent에서도 HG-9900, SilIMU02, LN-200의 출력을 제공하며, 상용 IMU의 인터페이스를 가진 SimInertial을 2017년도부터 현재까지 출시하고 있다 (Spirent 2022). 이러한 제품은 IMU 출력뿐만 아니라 INS 항법 해도 제공한다.
1990년대 초에 미국 국방부의 GPS Inertial Navigation Assembly (GINA) 프로그램에서 GPS 신호 및 IMU 데이터를 제공하는 기능을 요청하면서 GNSS/INS 통합항법 시스템의 시뮬레이터 개발이 시작되었다 (May 1993). 1998년도에는 Honeywell 사와 Litton 사가 Naval Air Development Center와 협력하여 Simulated Inertial GPS NAvigation Laboratory (SIGNAL) 이라고 불리는 GPS/INS 시뮬레이터를 발표하였다 (May 2022). Spirent 사에서는 2013년도부터 최근까지 GSS 6300/7000/9000 등의 GNSS 시뮬레이터를 발표하고 있으며, 여기에 INS 시뮬레이터인 SimInertial과 궤적 생성 시뮬레이터인 SimGen을 결합한 GNSS/INS 통합항법 시스템 성능평가를 위한 플랫폼을 소개하였다 (Spirent 2023). CAST Navigation 사에서는 2019년도에 GPS/INS 통합항법 시스템의 성능 평가를 위하여 궤적을 생성하는 scenario generator, GPS RF 신호를 생성하는 GPS Satellite simulator, IMU 데이터를 생성하는 inertial & sensor simulation을 포함한 CAST-3000을 소개하였다 (CAST NAVIGATION 2019).
현재까지의 시뮬레이터 연구 결과 및 제품을 살펴보면, 더욱 많은 항법 위성 신호를 제공하는 형태로 발전할 것을 예상할 수 있다. GNSS 시뮬레이터는 다중 주파수를 가진 다중 위성군에 대응하기 위하여 수정 및 확장이 쉬운 소프트웨어 기반의 IF 단위 시뮬레이터에 RF 신호로 상향변환하는 Off-The-Shelf (OTS) 인터페이스 보드를 연결한 형태로 제품이 출시되고 있으며, INS 시뮬레이터는 GNSS 시뮬레이터와 연결하여 GNSS 신호와 IMU 데이터를 같이 제공하는 형태로 출시되고 있다. 즉, 범용 PC에 IF 단위 시뮬레이터, IMU 데이터 생성 프로그램을 구현하고, 필요 시에 OTS 인터페이스 보드를 추가하면, 전술한 형태와 유사한 GNSS/INS 통합항법 시스템의 시뮬레이터를 구현할 수 있을 것이다. 여기에 시각 동기와 관련 OTS 인터페이스 보드를 추가하면 동기된 GNSS신호와 IMU 데이터를 제공할 수 있을 것이다.
본 논문에서는 PC와 OTS 인터페이스 보드를 이용한 GNSS/INS 통합 항법 시스템의 시뮬레이터 설계 방법을 제안하고, 시뮬레이터를 구현한 결과를 제시하고자 한다. 먼저, GNSS/INS 통합항법 시스템의 시뮬레이터의 요구 조건을 제시하고, 요구 조건을 만족하는 GNSS/INS 통합항법 시스템의 시뮬레이터 설계 방법을 제시하였다. 제시한 설계 방법의 유용함을 보이기 위하여 GPS/INS 통합항법 시스템의 시뮬레이터 구현 결과를 제시하였다. 2장에서는 GNSS/INS 통합항법 시뮬레이터 설계를 위한 요구 조건을 서술하고, 3장에서는 2장의 요구 조건에 따른 GNSS/INS 통합 항법 시스템의 시뮬레이터 설계 방법을 제안하고 시뮬레이터의 구성 요소를 서술하였다. 4장에는 GPS/INS 통합항법 시스템의 시뮬레이터 구현 결과, 5장에서는 결론 및 추후 계획을 서술한다.
하드웨어 기반의 시뮬레이터는 전용 프로그램이 필요하며, 항법 센서의 신호 및 데이터를 추가로 제공하려면 전체 하드웨어를 교체해야 한다. 소프트웨어 기반의 시뮬레이터는 사용자가 원하는 구조로 설계할 수 있으며, 대상 항법 시스템이 변경되어도 소프트웨어 업데이트를 통해 유연하게 대처할 수 있다. 특히, 소프트웨어 기반의 시뮬레이터를 범용 PC에서 설계할 경우 Application Program Interface (API)를 이용할 수 있을 뿐만 아니라 유지 보수가 쉬우며, 필요 시 PC에 OTS 인터페이스 보드를 추가하면 기능을 확장할 수 있다. 따라서, GNSS/INS 통합항법 시스템의 시뮬레이터는 이러한 사항을 반영하여 아래의 요구 조건을 만족하도록 설계한다.
첫째, 시뮬레이터의 주요 기능을 모듈화된 소프트웨어로 설계한다. 하드웨어 기반에 비하여 소프트웨어 기반의 시뮬레이터는 수정 및 확장이 쉽기 때문에, 새로운 주파수 대역을 갖는 항법 위성을 추가하거나 추후 다중 센서 통합항법 시스템 시뮬레이터로 확장할 때, 유연하게 대처할 수 있을 것이다. 그리고, 소프트웨어를 모듈화하면 신호 생성 소프트웨어 모듈을 필요 시에 재 사용할 수 있을 뿐만 아니라 개별 기능을 검증할 수 있을 것이다.
둘째, 범용 PC에 시뮬레이터의 소프트웨어를 구현하고, 필요 시 OTS 인터페이스 보드를 추가한다. 범용 PC는 검증된 API를 많이 제공하고 있다. 그리고, 범용 PC와 호환되는 OTS 인터페이스 보드는 제조사에서 해당 OTS 보드를 제어하기 위한 소프트웨어도 같이 제공하므로, 이를 이용하면 시뮬레이터 개발에 소요되는 비용 및 시간을 줄일 수 있을 것이다.
셋째, 실제 항체의 운동에 가까운 궤적을 생성해야 한다. 시뮬레이터에서 항체의 궤적을 기반으로 GNSS 신호와 IMU 데이터를 생성하기 때문에 실제 항체의 운동에 가까운 궤적을 생성할수록 차량 탑재 실험 결과와 유사한 결과를 얻을 수 있을 것이다. 항법 시스템을 탑재한 차량, 항공기, 배 등 여러가지 종류의 항체는 지상, 공중, 해상에서 운동한다. 이때, 항체의 운동은 환경이나 항체의 종류에 따라 여러가지 제약을 가지므로, 운동 제약을 가진 항체의 궤적을 생성할 수 있어야 한다.
넷째, 충실도(fidelity)가 높은 GNSS 신호와 IMU 데이터를 생성해야 한다. 수신한 GNSS 신호에는 위성의 오차, 전송 과정 중 발생한 오차, 수신기 오차 등과 같은 여러가지 오차가 포함되어 있다. IMU 데이터에는 여러가지 가속도계와 자이로스코프 오차가 포함되어 있으며, IMU 등급에 따라 오차 특성이 다르다. 따라서, 시뮬레이터에서 GNSS 신호와 IMU 데이터를 생성할 때, 전술한 오차를 포함하여야 한다.
다섯째, UI를 시뮬레이터에 포함시킨다. UI를 포함하지 않은 시뮬레이터는 사용자가 직접 프로그램 내부의 파라미터를 수정해야 하며, 결과를 확인하기 위하여 별도의 프로그램이 필요하다. 반면에 UI를 포함한 시뮬레이터는 사용자가 시뮬레이터 내부를 모르더라도 UI를 통해 파라미터를 설정할 수 있으며, 생성한 신호 및 데이터의 그래프와 수치를 쉽게 확인할 수 있다.
2장에서 서술한 요구 조건을 반영한 GNSS/INS 통합항법 시스템의 시뮬레이터를 Fig. 1에 나타내었다. GNSS/INS 통합항법 시스템의 시뮬레이터는 UI, 궤적 생성기, GNSS IF 신호 생성기, IF-RF 상향변환기, IMU 데이터 생성기, IMU 출력 인터페이스 보드로 이루어진다.
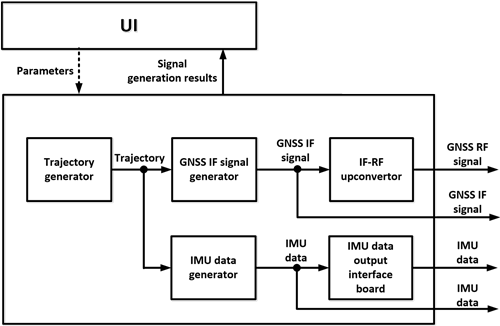
Fig. 1. Structure of the proposed simulator for the GNSS/INS integrated navigation system.
궤적 생성기는 Fig. 2에 나타낸 바와 같이 운동 시나리오 파일로부터 변수를 얻는 블록과 위치, 속도, 자세 생성 블록으로 이루어진다. UI를 이용하여 생성한 운동 시나리오 파일에는 샘플링 시간, 초기 위치, 초기 속도, 초기 자세, 최대 가속도, 최대 저크, 최대 각속도, 최대 각가속도, 그리고 운동 시나리오가 기록되어 있다. 위치, 속도, 자세 생성 블록은 초기치 변수와 항체 운동을 제한하는 변수, 그리고 운동 시나리오에 포함된 각각의 운동을 생성하기 위한 변수들로부터 항체의 궤적을 생성한다.
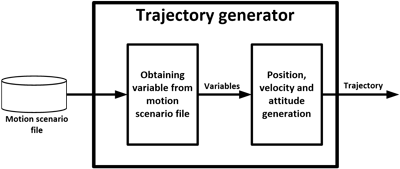
Fig. 2. Structure of the trajectory generator.
GNSS IF 신호 생성기의 구조를 Fig. 3에 나타내었다. GNSS IF 신호 생성기는 위성 궤도 정보 파일 디코딩, 위성 궤도 계산, GNSS 안테나의 위치 및 속도 생성, 거리 및 거리 변화율 계산, 위성 궤도 오차 생성, 전리층 오차 및 이온층 오차 생성, 항법 메시지, 코드, 반송파 생성, 양자화 블록으로 이루어진다. 먼저, Receiver INdependent EXchange (RINEX) 파일로부터 위성 궤도 정보 파일을 디코딩하여 Ephemeris 데이터를 추출하고, 이로부터 위성의 궤도를 계산한다. 그리고, 항체의 위치, 속도로부터 GNSS 수신기 안테나의 위치와 속도를 구한다. Ephemeris 데이터로부터 계산한 위성 궤도와 GNSS 수신기 안테나의 위치와 속도로부터 GNSS 위성과 수신기 사이의 거리와 거리 변화율을 계산한다. 이때, UI에서 제공한 파라미터로부터 생성한 전리층 오차, 대류층 오차가 거리와 거리 변화율 계산 결과에 추가되어 의사거리와 의사거리 변화율을 출력한다. 마지막으로 항법 메시지, 코드, 반송파, 생성 결과를 곱하고, 양자화된 GNSS IF 신호를 출력한다.
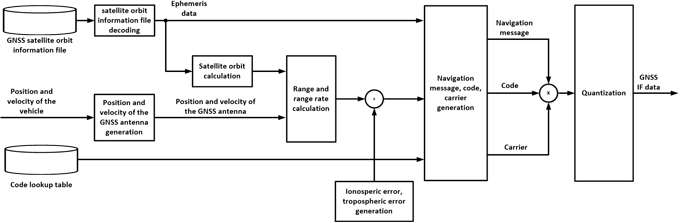
Fig. 3. Structure of the GNSS IF signal generator.
IMU 데이터 생성기는 Fig. 4에 나타낸 바와 같이 중력 계산, Earth rate & Craft rate 계산, True 비력 생성, True 각속도 생성, 가속도계 오차 생성, 자이로스코프 오차 생성 블록으로 이루어진다. 먼저, 궤적 생성기로부터 출력된 항체의 위치로부터 중력을 계산한다. Earth rate과 craft rate은 항체의 위치와 속도로부터 계산한다. True 비력은 속도, 중력, Earth rate, craft rate, 자세로부터 생성하고, 여기에 오차를 더하여 가속도계 데이터를 생성한다. True 각속도는 Earth rate, craft rate, 자세로부터 생성하고, 여기에 오차를 더하여 자이로스코프 데이터를 출력한다. 오차로 랜덤 워크, 바이어스, 환산 계수, 비정렬 오차, 1차/2차 마르코프 프로세스가 포함될 수 있으며, UI에서 제공한 파라미터로부터 생성한다.
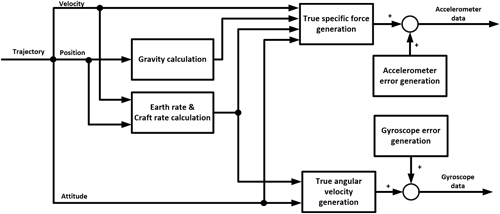
Fig. 4. Structure of the IMU data generator.
첫째 요구 조건을 만족시키기 위하여 궤적 생성기, IMU 데이터 생성기, GNSS IF 신호 생성기의 소프트웨어를 모듈화한다. 특히, GNSS IF 신호 생성기에 새로운 항법 위성 신호 생성기를 추가할 경우에는 안테나의 위치, 속도를 계산하는 블록과 거리와 거리 변화율을 계산하는 블록을 재 사용할 수 있다. 그리고, 가시 위성 판단 결과에 따라 GNSS 위성 신호를 채널 별로 동시에 생성하고자 할 경우에는 위성 궤도 계산, 거리 및 거리 변화율 계산, 이온층 오차 및 전리층 오차 생성, 항법 메시지, 코드, 반송파 생성, 양자화 블록을 재 사용할 수 있다.
둘째 요구 조건을 만족시키기 위하여 UI, 궤적 생성기, GNSS IF 신호 생성기, IMU 데이터 생성기는 범용 PC에서 설계하고, IF-RF 상향변환기, IMU 데이터 출력 인터페이스 보드는 OTS 인터페이스 보드를 이용한다. National Instrument (NI) 사의 Universal Software Radio Peripheral (USRP) 보드를 IF-RF 상향변환기로 이용한다 (National Instruments 2023). 상용 IMU는 Synchronous Data Link Control (SDLC), Serial Peripheral Interface (SPI), Inter-Integrated-Circuit (I2C) 등의 프로토콜을 이용하여 IMU 데이터를 출력하는데, 범용 PC에 OTS 인터페이스 보드를 추가하여 사용한다.
궤적 생성기의 입력인 운동 시나리오 파일을 보면 셋째 요구 조건을 만족함을 알 수 있다. 운동 시나리오 파일에 포함된 최대 가속도, 최대 저크, 최대 각속도, 최대 각가속도를 이용하여 항체의 운동 제약 조건을 설정할 수 있다. 즉, 운동 시나리오 파일만 수정하면 운동 제약 조건을 가진 항체의 궤적을 생성할 수 있으며, 이를 통해 항체의 종류에 따른 특성을 반영할 수 있다.
넷째 요구 조건을 만족시키기 위하여 GNSS IF 신호 생성기와 IMU 데이터 생성기에 오차 블록을 추가한다. 이를 통해 실제 GNSS IF 신호와 IMU 데이터에 가까운 신호를 생성할 수 있다.
다섯째 요구 조건을 만족시키기 위하여 시뮬레이터에 UI를 포함한 것을 알 수 있다. UI는 LabVIEW, Matlab, Microsoft Foundation Class (MFC)를 이용하여 구현할 수 있다. 특히, LabVIEW는 그래픽 기반으로 프로그래밍할 수 있으며, NI 사의 하드웨어인 USRP 보드를 제어할 수 있는 여러가지 함수를 제공하므로, LabVIEW로 UI를 설계하도록 한다 (National Instruments 2005). 설계한 UI는 파라미터를 설정하고, 궤적 생성 결과, GNSS 신호 생성 결과와 IMU 데이터 생성 결과, 신호 및 데이터 생성 중 얻어진 변수를 보여줄 수 있도록 한다. 사용자는 이를 통해 생성한 신호 및 데이터에 대해 그래프와 수치로 결과를 쉽게 확인할 수 있다.
제안한 설계 방법을 이용하여 구현한 시뮬레이터를 Fig. 5에 나타내었다. 범용 PC에 UI, 궤적 생성기, GPS L1 C/A IF 신호 생성기를 구현하였으며, IF-RF 상향변환기는 NI 사의 USRP 2952-R, IMU 출력 인터페이스 보드는 Fastcom 사의 FSCC/4-PCIe를 이용하였다. IMU 출력 인터페이스 보드는 SDLC 프로토콜을 이용하여 IMU 데이터를 출력하도록 하였다. Intel i7-8700 CPU, 16 GB RAM의 사양을 가진 범용 PC를 사용하였으며, 시뮬레이터 소프트웨어는 Windows 10 Operating System (OS) 환경에서 동작된다. UI는 LabVIEW 2015로 구현하였으며, 궤적 생성기, GPS L1 C/A IF 신호 생성기, IMU 데이터 생성기는 Visual C++ 2022에서 Dynamic Linked Library (DLL)로 작성하고, DLL의 입력 및 출력을 UI와 연결하였다.
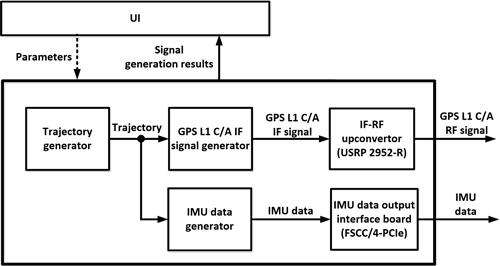
Fig. 5. Structure of the proposed simulator for GPS/INS integrated navigation system.
제안한 방법으로 구현한 시뮬레이터는 소프트웨어와 범용 PC와 OTS 인터페이스 보드로 검증하였다. 시뮬레이터의 소프트웨어를 검증하기 위하여 Fig. 6, 전체 시뮬레이터를 검증하기 위하여 Fig. 7과 같이 구성하였다. Figs. 6과 7의 연두색 블록은 시뮬레이터의 기능 블록을 의미하며, Fig. 8에는 Fig. 7에서 보듯이 범용 PC와 USRP 2952-R, FSCC/4-PCIe를 연결하여 구성한 시뮬레이터 하드웨어를 나타내었다.
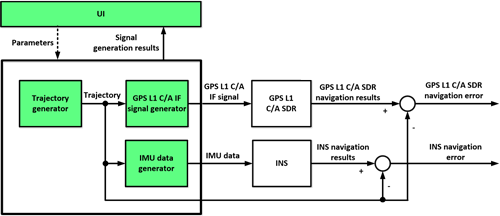
Fig. 6. Performance evaluation system for simulator software.
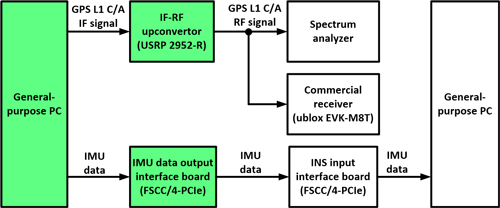
Fig. 7. Performance evaluation system for simulator.
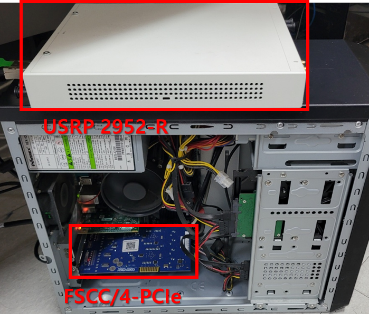
Fig. 8. Simulator hardware.
GPS L1 C/A IF 신호는 GPS L1 C/A SDR을 통해 검증하며, SDR 항법 결과를 True 위치, 속도와 비교하였다. IMU 데이터 생성기에서 출력된 True IMU 데이터는 INS를 통해 검증하며, INS 항법 결과를 True 위치, 속도, 자세와 비교하였다.
GPS L1 C/A RF 신호 검증을 위하여 Matlab으로 IF 신호의 스펙트럼을 확인하고, 주파수 분석기(spectrum analyzer)를 이용하여 RF 신호의 스펙트럼을 확인하였다. 그리고, GPS L1 C/A RF 신호를 ublox EVK-M8T 수신기에 입력하여 얻은 항법 결과를 True 위치와 비교하였다. 마지막으로, IMU 출력 인터페이스를 거친 IMU 데이터 검증을 위하여 범용 PC에서 출력된 IMU 데이터와 디코딩하여 얻은 IMU 데이터를 비교하였다.
UI를 통해 궤적 생성기의 파라미터를 입력하여 운동 시나리오 파일을 생성하고, 궤적 생성기에서 출력된 40초 동안 정지 후 복잡한 운동을 하는 항체의 궤적을 UI에 표시한 결과를 Fig. 9에 나타내었다. 궤적 생성 결과로 항체의 위치, 속도, 가속도, 자세, 각속도를 볼 수 있다.
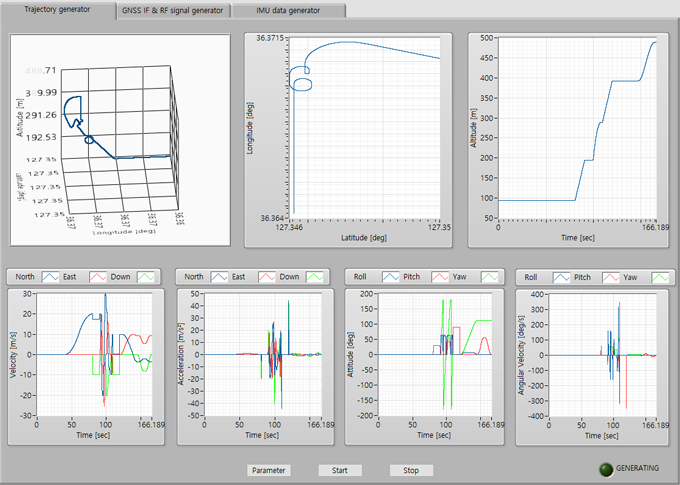
Fig. 9. Trajectory generation results display.
Fig. 9에 나타낸 항체의 궤적으로부터 샘플링 주파수를 25 MHz, IF 주파수를 5.42 MHz로 설정하고, 생성한 GPS L1 C/A IF 신호를 UI에 표시한 결과를 Fig. 10에 나타내었다. GPS L1 C/A IF 신호 생성 결과로부터 GPS 수신기 안테나의 위치와 속도, Skyplot, C/N0를 볼 수 있다. Fig. 11에는 GPS L1 C/A IF 신호로부터 얻은 SDR 항법 결과를 나타내었으며, 항법 결과의 수평 Root Mean Square Error (RMSE), 수직 RMSE, 3차원 RMSE는 Table 1에 나타내었다. Figs. 10과 11, 그리고 Table 1을 보면, GPS L1 C/A IF 신호 생성기가 신호를 문제 없이 생성함을 알 수 있다.
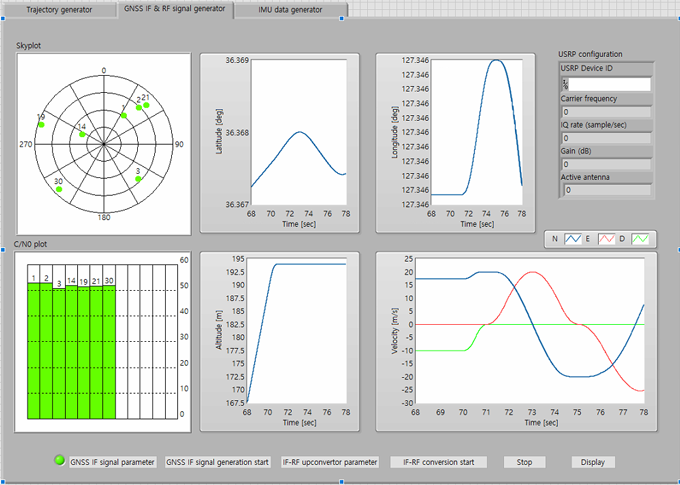
Fig. 10. GPS IF signal generation results.
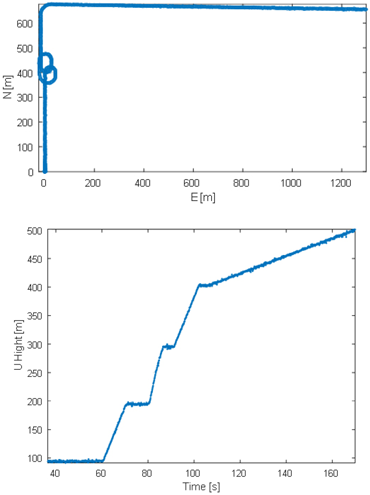
Fig. 11. GPS L1 C/A SDR navigation results.
Table 1. RMSE of GPS L1 C/A SDR navigation results.
| Axis | Value (m) |
|---|---|
| North, East (Horizontal) Down (Vertical) North, East, Down (Three dimension) | 1.1179 1.2713 1.6928 |
오차를 추가하지 않고, 출력율을 100 Hz로 설정하여 생성한 IMU 데이터를 UI에 표시한 결과를 Fig. 12에 나타내었다. IMU 데이터 생성 결과로부터 시간에 따른 가속도계와 자이로스코프 데이터를 볼 수 있다. 생성한 IMU 데이터로부터 구한 INS 항법 결과의 RMSE는 Table 2에 나타내었으며, 궤적 생성기에서 생성한 궤적과 유사한 것을 알 수 있다. 즉, Fig. 12와 Table 2를 보면, IMU 데이터를 문제없이 생성함을 알 수 있다.
Table 2. RMSE of INS navigation result.
| Axis | Value | |
|---|---|---|
| Position (m) | North East Down | 0.0324 0.0356 0 |
| Velocity (m/s) | North East Down | 0.0317 × 10-8 0.4372 × 10-8 0.9709 × 10-8 |
| Attitude (m/s) | Roll Pitch Yaw | 0.4804 × 10-9 0.0021 × 10-9 0.6670 × 10-9 |
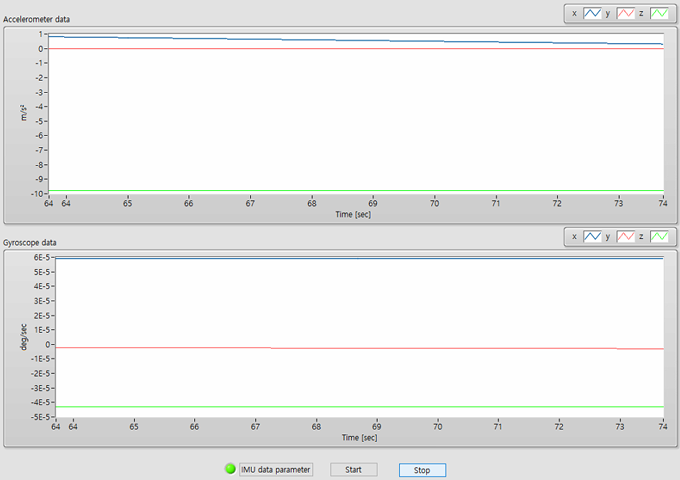
Fig. 12. IMU data generation results.
Fig. 13a에는 GPS L1 C/A IF 스펙트럼, Fig. 13b에는 주파수 분석기를 통해 확인한 RF 신호의 스펙트럼을 나타내었다. Fig. 13a를 보면 GPS L1 C/A IF의 중심 주파수가 IF 신호 생성 시에 설정한 값인 5.42 MHz인 것을 알 수 있고, Fig. 13b를 보면 스펙트럼 분석기에 나타난 RF 신호의 중심 주파수는 GPS L1 C/A의 중심 주파수인 1575.42 MHz인 것을 알 수 있다. 그리고, 두 그림의 결과는 GPS 신호의 스펙트럼과 일치함을 알 수 있다. Fig. 14에는 GPS L1 C/A RF 신호를 ublox EVK-M8T 상용 수신기에 입력하여 얻은 항법 결과를 나타내었으며, Table 3에 Fig. 14의 RMSE를 나타내었다. Fig. 14를 보면 Fig. 11에 제시한 SDR 항법 결과와 유사한 것을 알 수 있으며, Table 3를 보면 Table 1에 제시한 IF 신호 검증 결과에 비해 오차는 큰 차이가 없음을 알 수 있다. 즉, IF-RF 상향변환기가 GPS L1 C/A IF 신호를 문제없이 RF 신호로 상향 변환함을 알 수 있다.
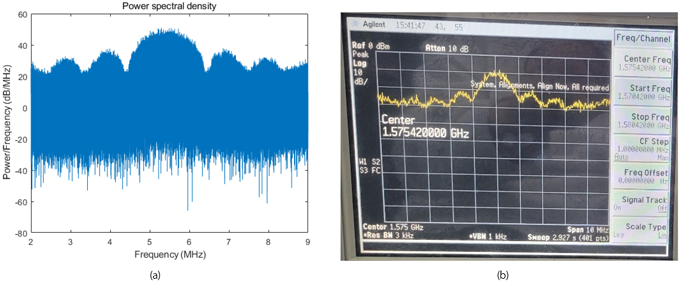
Fig. 13. (a) Frequency spectrum for GPS L1 C/A IF signal, (b) Frequency spectrum for GPS L1 C/A RF signal.
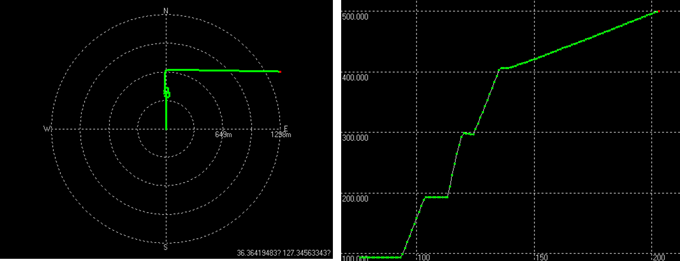
Fig. 14. ublox EVK-M8T navigation results.
Table 3. RMSE of commercial receiver navigation result.
| Axis | Value (m) |
|---|---|
| North, East (Horizontal) Down (Vertical) North, East, Down | 1.5192 4.3405 4.5987 |
Fig. 15에는 범용 PC 2대를 이용하여 IMU 출력 인터페이스를 거친 IMU 데이터를 검증한 결과를 나타내었다. IMU 데이터를 SDLC 프로토콜로 변환하고, 이를 다시 디코딩하여 IMU 데이터를 추출할 때, 손실 없이 IMU 데이터를 복원하는 것을 알 수 있으며, 이를 통하여 IMU 관련 주변 장치가 잘 동작함을 알 수 있다.
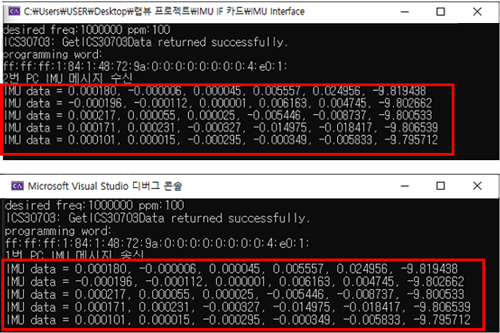
Fig. 15. IMU data transmission results.
본 논문에서는 PC와 OTS 인터페이스 보드를 사용한 GNSS/INS 통합 항법 시스템의 시뮬레이터 설계 방법을 제안하고, 이에 따른 GPS/INS 통합항법 시스템의 시뮬레이터 구현 결과를 제시하였다. GNSS/INS 통합항법 시스템의 시뮬레이터의 요구 조건을 제시하였으며, 이를 만족하는 시뮬레이터의 설계 방법을 서술하였다. 검증 결과로부터 제안한 방법으로 구현한 GPS/INS 통합항법 시스템의 시뮬레이터가 GPS L1 C/A IF 및 RF 신호와 IMU 데이터를 잘 생성함을 확인하였다.
추후에는 구현한 시뮬레이터에 KPS 신호 생성기를 추가하여, KPS 수신기 개발에 이용할 것이다. GNSS 신호와 IMU 데이터의 시각 동기를 위하여 타이머 카드를 추가하고, 동기된 GNSS 신호와 IMU 데이터를 검증할 것이다. 그리고, 구현한 시뮬레이터를 다중 센서 통합 시스템의 시뮬레이터로 확장하기 위하여 고도계, 지자계 데이터 생성기를 추가할 것이다. 마지막으로, 현재 범용 PC에서 구현한 시뮬레이터에서 GPU의 병렬 처리 기능을 이용하여 실시간 GNSS 신호를 생성하는 기능을 추가할 것이다.
Conceptualization, S. H. Oh and D.-H. Hwang; methodology, J. H. Son, S. H. Oh and D.-H. Hwang; software, J. H. Son; supervision, S. H. Oh and D.-H. Hwang; writing – review & editing, D.-H. Hwang.
The authors declare no conflict of interest.
Akos, D. & Braasch, M. 1996, A Software Radio Approach to Global Navigation Satellite System Receiver Design, the 52nd Annual Meeting of The Institute of Navigation, 19-21 Jun 1996, Cambridge, MA, pp.455-463.
Akos, D. M. 1997, A Software Radio Approach to Global Navigation Satellite System Receiver Design, Ph. D thesis, Fritz J. and Dolores H. Russ College of Engineering and Technology Ohio University.
Akos, D., Arribas, J., Bhuiyan, M. Z. H., Closas, P., Dovis, F., et al. 2022, GNSS Software Defined Radio: History, Current Developments, and Standardization Efforts, in the 35th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2022), 19-23 Sep 2022, Denver, Colorado, pp.3180-3209.
Bonnor, A. C. N. 2012, A Brief History of Global Navigation Satellite Systems, The Journal of Navigation, 65, 1-14. https://doi.org/10.1017/S0373463311000506
CAST NAVIGATION 2019, CAST-3000 Complete EGI Integration, [Internet], cited 2019 Jun, available from: https://castnav.com/wp-content/uploads/cast_3000-1.pdf
CAST NAVIGATION 2023, IMU Modeling and Simulation, [Internet], cited 2023 Dec 23, available from: https://www.defenseadvancement.com/company/cast-navigation/imu-ins-modeling-simulation/
Dong, L. 2003, IF GPS Signal Simulator Development and Verification, M.S. Thesis, Calgary, Canada.
Dong, L., Ma, C., & Lachapelle, G. 2004, Implementation and Verification of a Software-Based IF GPS Signal Simulator, in the 2004 National Technical Meeting of The Institute of Navigation (ION NTM 2004), 26-28 Jan 2004, San Diego, CA, pp.378-389. https://www.ion.org/publications/abstract.cfm?articleID=5514
Farrell, J. A. 2008, Aided navigation – GPS with high rate sensors (New York: McGraw-Hill)
Groves, P. D. 2013, Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed. (Boston: Artech House Inc.)
Honeywell 2022, Embedded GPS/INS (EGI) Navigation System with Advanced Anti-Jam Protections, [Internet], cited 2021 Sep 2, available from: https://aerospace.honeywell.com/content/dam/aerobt/en/documents/learn/products/navigation-and-radios/brochures/N61-0411-000-003_EGI-Anti-Jam-brochure_Feb2019.pdf
Im, S.-H. & Jee, G.-I. 2014, Software-based Real-time GNSS Signal Generation and Processing Using a Graphic Processing Unit (GPU), Journal of Positioning, Navigation, and Timing, 3, 99-105. https://doi.org/10.11003/JPNT.2014.3.3.099
Jo, G. D., Kim, J. Y., Lee, K. T., Lee, S. H., Sheen, M. J., et al. 2004, Trends of Software Defined Radio Technology Developments, Electronics and Telecommunications Trends, 19, 63-72. https://doi.org/10.22648/ETRI.2004.J.190307
Lee, S., Ryu, J. G., & Byun, W. J. 2021, Survey on Navigation Satellite System and Technologies, 36, 61-71. https://doi.org/10.22648/ETRI.2021.J.360406
Lim, S., Lim, D. W., Liu, M., Moon, S. W., Park, C., et al. 2008, Design of a Software-based Multi-Channel GNSS IF Signal Generator, in the 2008 International Conference on Control, Automation and Systems, 14-17 Oct 2008, Seoul, Korea, pp.754-758. https://doi.org/10.1109/ICCAS.2008.4694599
Loegering, G. 1999, The Global Hawk Navigation System an Odyssey in the Development of an Unmanned Aerial Vehicle, in the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), 14-17 Sep 1999, Nashville, TN, pp.1107-1114.
May, M. B. 1993, Inertial Navigation and GPS, GPS world, September 1993, 56-74. https://gge.ext.unb.ca/Resources/gpsworld.september93.pdf
May, M. B. 2022, Navigation Heaven, ION Newsletter, 32, 15-17. https://www.ion.org/newsletter/upload/ION-Fall22.pdf
National Instruments 2005, LabVIEW User Manual, https://download.ni.com/support/manuals/374029a_0129.pdf
National Instruments 2023, product brochure – NI Ettus USRP Software Defined Radios, [internet], cited 2023 Sep 13, available from: https://www.ni.com/content/dam/web/pdfs/NI_USRP_Product_Flyer_WR.pdf
Noureldin, A ., Karamat, T. B., & Georgy, J. 2013, Fundamentals of Inertial Navigation, Satellite-based Positioning and their Integration (New York: Springer)
Orolia 2021, GSG-8 Series – Advanced GNSS Simulator, [Internet], cited 2021 Sep 2, available from: https://safrannavigation-timing.com/wp-content/uploads/2021/07/GSG-8-Datasheet.pdf
Park, J.-K. & Um, D.-Y. 2016, Analysis of Positioning Performance According to the Condition of Multiconstellation GNSS, Journal of Korea Academia-Industrial cooperation Society, 17, 567-572. https://doi.org/10.5762/KAIS.2016.17.4.567
Park, K., Yang, J.-M., & Park, C. 2018, A Design and Implementation of Software Defined Radio for Rapid Prototyping of GNSS Receiver, Journal of Positioning, Navigation, and Timing, 7, 189-203. https://doi.org/10.11003/JPNT.2018.7.4.189
Peteovello, M. G. & Curran, J. T. 2017, Simulators and Test Equipment, Springer Handbook of Global Navigation Satellite Systems, P. J. G. Teunissen & O. Montenbruck, eds. (Gewerbestrasse, Switzerland: Springer)
Spirent 2022, MS3030 SimINERTIAL – Integrated GNSS/Inertial Test, [Internet], cited 2022 Jan, available from: https://www.spirent.com/assets/u/siminertial-datasheet
Spirent 2023, GSS9000 – Maximum performance without compromise for PNT test environments, [Internet], cited 2023 Nov, available from: https://www.spirent.kr/assets/u/datasheet-gss9000-series
Titterton, D. & Weston, J. L. 2004, Strapdown Inertial Navigation Technology (Stevenage: Institute of Electrical Engineers)
Valdes, R. & Bowie, D. 2023, The Predator Drone: A Pioneering Force in Modern Warfare [Internet], cited 2023 Sep 12, available from: https://science.howstuffworks.com/predator.htm