Jae Hoon Son1, Junwoo Jung1, Sang Heon Oh2, JunMin Park1, Dong-Hwan Hwang1†
1Department of Electronics Engineering, Chungnam National University, Daejeon 34134, Korea
2Advanced Technology Laboratory, Microinfinity Co., Ltd., Daejeon 34012, Korea
†Corresponding Author: E-mail, dhhwang@cnu.ac.kr Tel: +82-42-821-5670 Fax: +82-42-823-5436
Citation: Son, J. H., Jung, J. K., Oh, S. H., Park, J., & Hwang, D.-H., 2024, LabVIEW-based User Interface Design for Multi-Integrated Navigation Systems, Journal of Positioning, Navigation, and Timing, 13, 75-83.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 March, Volume 13, Issue 1, pages 75-83. https://doi.org/10.11003/JPNT.2024.13.1.75
Received on Dec 27, 2023, Revised on Jan 18, 2024, Accepted on Jan 23, 2024, Published on Mar 15, 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
In order to reduce the time and cost of developing a navigation system, a performance evaluation platform can be used. A User Interface (UI) is required to effectively evaluate the performance, which sets parameters and gives navigation sensor signals and data display, and also displays navigation results. In this paper, a LabVIEW-based UI design method for multi-integrated navigation systems is proposed and implementation results are presented. The UI consists of a signal and data generation part and a signal and data processing part. The signal and data generation part sets parameters for the signal and data generation and displays the navigation sensor signal and data generation results. The signal and data processing part sets parameters for the signal and data processing and displays the navigation results. The signal and data generation part and signal and data processing part are designed to satisfy the requirements of the UI for a performance evaluation of the navigation system. In order to show the usefulness of the proposed UI design method, parameters of the signal and data generation and the signal and data processing are set through the LabVIEW-based UI, and the Global Positioning System (GPS) signal and inertial measurement unit data generation results and the navigation results of a GPS Software Defined Receiver (SDR) and inertial navigation system are confirmed. The implementation results show that the proposed UI design method helps users conduct an effective performance evaluation of navigation systems.
user interface, LabVIEW, GNSS/INS integrated navigation system
이동 통신 기술이 발달하면서 Location Based Service (LBS)의 수요가 증가하고, 항법 시스템에 대한 수요도 증가하고 있다 (Lee et al. 2005). 항법 시스템을 개발하려면 최종적으로 항체에 센서를 탑재하여 성능평가를 수행해야 하는데, 탑재 실험을 수행하기 전에 실험실 내에서 성능평가 플랫폼을 이용하면 개발에 드는 시간과 비용을 줄일 수 있다 (Peteovello & Curran 2017). 이때 성능평가 플랫폼은 항법 센서의 출력을 제공하며, 이로부터 항법 시스템의 항법 결과를 제공한다.
성능평가 플랫폼에 항체가 동작하는 환경이나 항법 알고리즘의 특성을 나타내는 파라미터의 변화를 제공하고, 항법 센서의 출력과 항법 알고리즘의 결과를 개발자와 사용자가 쉽게 볼 수 있는 디스플레이(display)를 제공하는 User Interface (UI)를 추가한다면, 매우 효과적으로 성능평가를 수행할 수 있을 것이다.
UI를 이용하여 성능평가 플랫폼의 센서 출력과 항법 결과를 디스플레이하는 많은 연구 결과가 발표되었다 (Han et al. 2003, Lim et al. 2008, Lanagran-Soler et al. 2015, Suprem et al. 2016, Khoiro et al. 2018, Kim et al. 2018, 2019). Han et al. (2003)은 Microsoft Foundation Class (MFC) 기반으로 UI를 구현하고, Global Positioning System (GPS)/Inertial Navigation System (INS) 통합항법 시스템의 위치, 속도, 자세 결과를 그래프로 나타내고 위치를 전자 지도상에 나타낸 결과를 제시하였다. Lim et al. (2008)은 다중 채널 Global Navigation Satellite System (GNSS) Intermediate Frequency (IF) 신호 생성기의 시뮬레이션 시간, 샘플링 주파수, 수신기의 초기 위치, GPS L1, L2C, L5 신호의 Signal to Noise Ratio (SNR), Galileo E1, E5 신호의 SNR을 설정하는 화면을 MFC 기반 UI로 구현한 결과를 제시하였다. Lanagran-Soler et al. (2015)은 위성 항법 시스템인 GPS, GLObal NAvigation Satellite System (GLONASS), Galileo, Beidou, Indian Regional Navigation Satellite System (IRNSS)의 위치와 지상에서 나타낸 위성의 위치(groundtrack)를 Matlab UI로 표시한 결과를 제시하였다. Suprem et al. (2016)은 스마트폰에 내장된 GPS 수신기와 IMU 데이터를 수집하고, Matlab UI를 통해 GPS 수신기의 항법 결과, INS 항법결과, 그리고 GPS/INS 통합항법 결과를 나타내었다. Khoiro et al. (2018)은 수중 항체에 탑재한 INS의 항법 결과를 표시하기 위하여 PyQt를 이용하여 UI를 구현하고, IMU의 원시(raw) 데이터, 위치, 속도, 자세, 가속도, 각속도를 표시한 결과를 제시하였다. Kim et al. (2018)은 다중 전파측위 융복합 항법시스템의 성능평가를 위하여 항법 환경 생성 모듈을 M&S 소프트웨어로 설계하고, Visual C++로 구현한 Graphic User Interface (GUI)를 통해 여러가지 항법 시스템의 파라미터를 설정하고, 지도 상에 항법 시스템의 신호원과 항법 결과를 표시한 결과를 제시하였다. Kim et al. (2019)은 항법전에 대응하기 위하여 다중 전파측위 융복합 시스템의 신호 생성부와 항법 알고리즘부의 M&S 소프트웨어를 설계하고, Visual C++로 구현한 GUI로 재머의 위치와 세기 등을 설정하고, 재머의 영향 범위와 항법 결과를 화면에 표시한 결과를 제시하였다.
이제까지의 연구 결과에서 보듯이 UI는 여러가지 언어를 이용하여 구현할 수 있다. 그래픽 기반의 프로그래밍 언어인 LabVIEW는 계측기 장비와의 인터페이스를 지원하며, 검증된 함수를 사용한다 (National Instruments 2005). 그리고, 데이터의 흐름을 시각적으로 볼 수 있기 때문에 디버깅이 쉬우며, C, C++, Python, Matlab과 같이 다른 언어로 작성한 라이브러리와 호환되므로, UI 설계가 매우 쉽다. NI사의 하드웨어는 LabVIEW 프로그램을 제공하는데, 성능평가 플랫폼에서 NI사의 하드웨어를 사용할 경우, 효율적인 프로그래밍이 가능하며, 개발에 필요한 시간을 줄일 수 있다 (National Instruments 2005).
본 논문에서는 다중 통합항법 시스템의 성능평가를 위하여 LabVIEW 기반의 UI 설계 방법을 제안하고, 구현 예를 제시하고자 한다. 성능평가를 위한 플랫폼은 항법 센서 신호 및 데이터 생성부와 항법 알고리즘인 신호 및 데이터 처리부로 나누어지므로, 전체 UI는 신호 및 데이터 생성부 UI와 신호 및 데이터 처리부 UI로 나누어진다. 먼저, 다중 통합항법 시스템의 성능평가를 위한 UI의 요구조건을 제시하고, 요구 조건을 만족하는 UI 설계 방법을 제시하였다. 제시한 설계 방법의 유용함을 보이기 위하여 GPS 수신기와 INS 성능평가 플랫폼의 UI 구현 예를 제시하였다. 2장에서는 다중 통합항법 시스템의 성능평가 플랫폼의 UI의 요구조건에 대해 서술하고, 3장에서는 다중 통합항법 시스템 성능평가 플랫폼의 UI 설계 방법을 서술한다. 4장에서 LabVIEW 기반 GPS 수신기와 INS의 UI 구현 예를 제시하고, 마지막으로 5장에서 본 연구의 결론을 정리하고, 추후 계획을 서술한다.
다중 통합항법 시스템의 성능평가를 위한 플랫폼은 Fig. 1에 나타낸 바와 같이 신호 및 데이터 생성부, 신호 및 데이터 처리부, 그리고 UI로 이루어진다. 신호 및 데이터 생성부는 궤적 생성기와 임의 갯수의 항법 센서 신호 및 데이터 생성기로 이루어진다. 신호 및 데이터 처리부는 임의 갯수의 항법 알고리즘과 다중 통합항법 알고리즘으로 이루어지며, 항법 시스템 각각의 항법 결과와 다중 통합 항법 결과를 제공한다. UI는 사용자가 입력한 파라미터를 신호 및 데이터 생성부, 신호 및 데이터 처리부에 전달하고, 신호 및 데이터 생성부의 신호 및 데이터 생성 결과와 신호 및 데이터 처리부의 항법 결과를 표시해야 하므로, 아래에 제시한 요구 조건을 만족해야 한다.
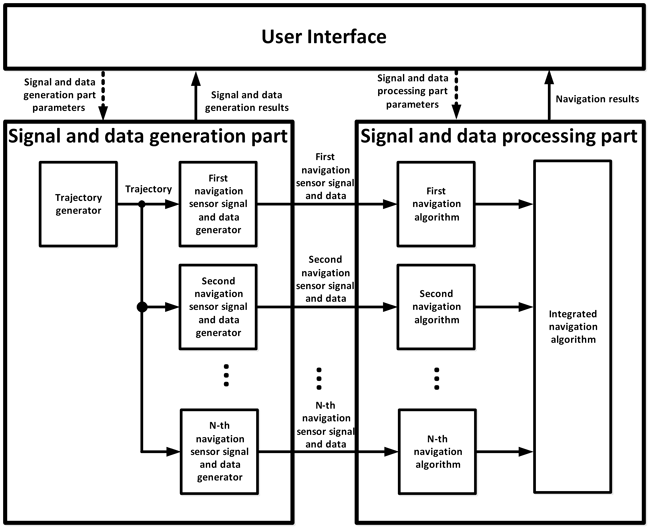
Fig. 1. Multi-integrated navigation system performance evaluation platform.
첫째, 확장 가능한 구조로 설계해야 한다. 개발자는 신호 및 데이터 처리부에 새로운 항법 알고리즘을 추가할 수 있다. 신호 및 데이터 생성부에서는 항법 알고리즘의 입력을 제공하기 위하여 새로운 항법 센서 신호 및 데이터 생성기를 추가할 수 있어야 한다. UI에 추가한 항법 센서 신호 및 데이터 생성기와 항법 알고리즘의 파라미터와 항법 결과를 확인할 수 있어야 하는데, 확장 가능한 구조로 설계하면 이를 매우 효과적으로 수행할 수 있다.
둘째, UI에서 궤적 생성기의 운동 시나리오와 항체의 운동 제한 조건을 정하고, 이를 확인할 수 있어야 한다. 궤적 생성기는 항체의 운동을 나타내므로, 사용자가 설정한 여러가지의 항체의 운동이 원하는대로 생성되었는지 결과를 확인할 수 있으면, 실제 상황에 가까운 다양한 항체에 대한 성능평가가 가능할 것이다.
셋째, 항법 센서의 사양을 정하고, 항법 센서의 신호 및 데이터 생성 결과를 확인할 수 있어야 한다. 궤적 생성기 출력으로부터 항법 센서의 신호 및 데이터를 생성할 때, 실제 항법 센서에 가까운 출력을 생성하기 위하여 이와 관련된 여러가지 파라미터를 입력할 수 있어야 한다. 그리고, 보다 상세한 성능평가를 위하여 센서 출력 내부 변수와 시간에 따른 항법 센서의 신호 및 데이터를 확인할 수 있어야 한다.
넷째, 항법 알고리즘의 초기치나 설정치를 입력하고, 항법 결과를 확인할 수 있어야 한다. 항법 알고리즘은 초기치와 설정치가 필요하며, 사용자는 이를 쉽게 변경할 수 있어야 한다. 그리고, 항법 알고리즘의 구동 중에 얻은 변수를 확인할 수 있어야 하며, 시간에 따른 항법 결과를 확인할 수 있어야 한다.
UI는 성능평가 플랫폼의 구성에 따라 신호 및 데이터 생성부 UI와 신호 및 데이터 처리부 UI로 이루어진다. 2장에서 제시한 요구 조건을 만족하기 위하여 다중 통합항법 시스템의 성능평가를 위한 플랫폼의 신호 및 데이터 생성부 UI 구조는 Fig. 2, 신호 및 데이터 처리부 UI 구조는 Fig. 3과 같다. 신호 및 데이터 생성부 UI는 궤적 생성기 탭과 항법 센서 각각의 출력 생성기 탭으로 구성되며, 신호 및 데이터 처리부 UI는 각각의 항법 알고리즘 탭과 통합항법 알고리즘 탭으로 구성된다.
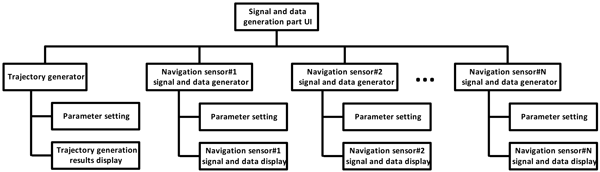
Fig. 2. Structure of signal and data generation part UI.

Fig. 3. Structure of signal and data processing part UI.
신호 및 데이터 생성부 UI와 신호 및 데이터 처리부 UI의 구조를 보면 첫째 요구 조건을 만족함을 알 수 있다. 신호 및 데이터 생성부 UI에서는 항법 센서 신호 및 데이터 생성기 탭을 임의의 갯수로 나누고, 신호 및 데이터 처리부 UI에서도 항법 알고리즘 탭을 임의의 갯수로 나눈다. 새로운 항법 알고리즘을 추가할 경우, 신호 및 데이터 생성부 UI와 신호 및 데이터 처리부 UI에 각각 탭을 추가하면 되므로 수정이 쉽다.
둘째 요구 조건을 만족시키기 위하여 신호 및 데이터 생성부 UI의 궤적 생성기 탭의 파라미터 설정 화면에서 항체의 초기치와 운동 시나리오 운동 제한 조건을 입력하도록 한다. 궤적 생성 결과 표시 화면에서는 시간에 따른 위치, 속도, 자세 생성 결과와 위도 경도로 나타낸 위치, 그리고, 위도, 경도, 고도로 나타낸 위치로 생성한 궤적을 보여줄 수 있도록 한다.
셋째 요구 조건을 만족시키기 위하여 신호 및 데이터 생성부 UI의 항법 센서 신호 및 데이터 생성기 탭의 파라미터 설정 화면에서 출력율, 측정 범위, 오차 특성 및 설정치를 입력하도록 한다. 항법 센서 신호 및 데이터 생성기 표시 화면에서는 시간에 따른 항법 센서 신호 및 데이터 생성 결과를 보여줄 수 있도록 한다.
넷째 요구 조건을 만족시키기 위하여 신호 및 데이터 처리부 UI의 항법 알고리즘 탭의 파라미터 설정 화면에서 초기치, 필터 설정치를 입력하도록 한다. 항법 결과 표시 화면에서는 시간에 따른 항법 결과를 일정 간격으로 보여줄 수 있도록 한다. 그리고, 자세를 제공하는 항법 알고리즘은 자세 지시계와 같은 화면을 통해 사용자가 현재 항체의 자세를 쉽게 이해할 수 있도록 한다.
3장에 제시한 설계 방법의 유용성을 보이기 위하여 Fig. 4와 같은 GPS 수신기와 INS의 성능평가 플랫폼에 대하여 UI를 구현하였다.
성능평가 플랫폼의 신호 및 데이터 생성부는 궤적 생성기 (Trajectory generator), GPS IF 신호 생성기 (GPS IF signal generator), Inertial Measurement Unit (IMU) 데이터 생성기 (IMU data generator), IF-RF 상향변환기 (IF-RF upconvertor), IMU 데이터 출력 I/F (IMU data output InterFace)로 구성하였다. IF-RF 상향변환기는 GPS 수신기 안테나의 입력을 제공하며, IMU출력 I/F는 INS의 입력을 제공한다. 상용 수신기는 GPS RF 신호로부터 항체의 위치, 속도를 제공하며, 상용 INS는 Synchronous Data Link Control (SDLC) 프로토콜을 사용한 IMU 데이터로부터 항체의 위치, 속도, 자세를 제공한다. 신호 및 데이터 처리부는 INS 입력 I/F (input I/F), INS 알고리즘 (algorithm), GPS SDR로 구성된다. 이러한 구성의 성능평가 플랫폼에 대하여 UI는 LabVIEW 프로그램으로 구현하였다.
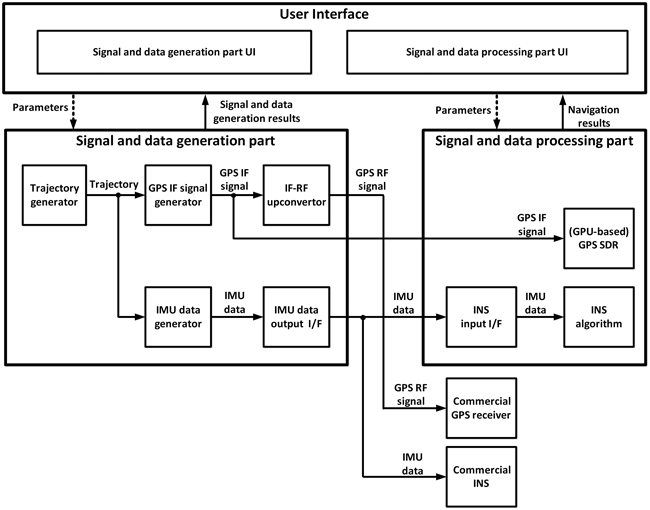
Fig. 4. Structure of GPS receiver and INS performance evaluation platform.
신호 및 데이터 생성부 UI 구조를 Fig. 5에 나타내었다. 신호 및 데이터 생성부 UI는 3장에서 제시한 바와 같이 궤적 생성기 탭, GNSS 신호 생성기 탭, IMU 데이터 생성기 탭으로 나누었다. 궤적 생성기 탭, GNSS 신호 생성기 탭, IMU 데이터 생성기 탭은 모두 파라미터 설정 화면과 결과 표시 화면으로 이루어진다. IF-RF 상향변환기의 파라미터 설정 화면을 별도로 구성하였으며, 파라미터 설정 결과와 GPS IF 신호 생성 결과는 같이 표시하도록 구성하였다. GPS IF 신호 생성 결과, IMU 데이터 생성 결과를 표시할 때, 처리 속도를 향상시키기 위하여 LabVIEW에서 제공하는 멀티 쓰레드 기능을 이용하고, 10초 간격으로 신호 및 데이터 생성 결과를 표시하도록 구현하였다.
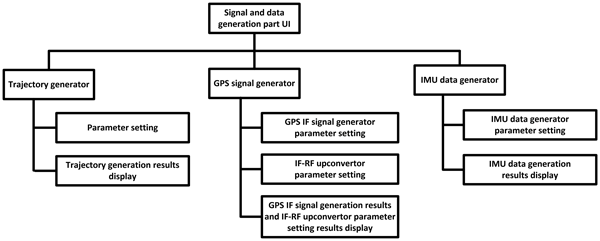
Fig. 5. Configuration of signal and data generation part UI.
신호 및 데이터 처리부 UI 구조를 Fig. 6에 나타내었다. 신호 및 데이터 처리부 UI는 3장에서 제시한 바와 같이 INS 탭, GPS SDR 탭으로 나누었다. INS 탭, GPS SDR 탭은 파라미터 설정 화면과 항법 결과 표시 화면으로 이루어진다. 신호 및 데이터 처리부 UI도 신호 및 데이터 생성부 UI와 마찬가지로 GPS SDR 항법 결과, INS 항법 결과를 표시할 때, 멀티 쓰레드 기능을 이용하고, 10초 간격으로 항법 결과를 표시하도록 구현하였다.
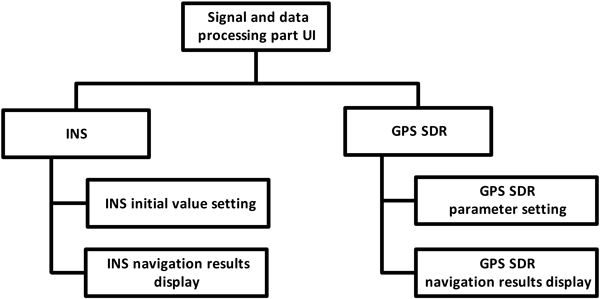
Fig. 6. Configuration of signal and data processing part UI.
신호 및 데이터 생성부 UI를 실행하고, 궤적 생성기의 파라미터를 선택하면 Fig. 7에 나타낸 궤적 생성기의 파라미터 설정 화면이 생성된다. 궤적 생성기 파라미터 설정 화면에서 항체의 초기 위치, 초기 속도, 초기 자세, 최대 가속도, 최대 저크, 최대 각가속도, 최대 각속도를 입력하고, 여러 개의 운동 명령(command)를 입력하여 운동 시나리오를 구성할 수 있다. 이를 통해 40초 동안 정지 후 여러가지 복잡한 운동을 하는 항체의 운동 시나리오를 생성하고, 궤적 생성기를 동작시켜 궤적 생성 결과를 확인할 수 있다. Fig. 8에서 보듯이 궤적 생성 결과를 통해 항체의 위치, 위도와 경도로 표시한 위치, 시간에 따른 고도, 속도, 가속도, 자세, 각속도를 확인할 수 있다.
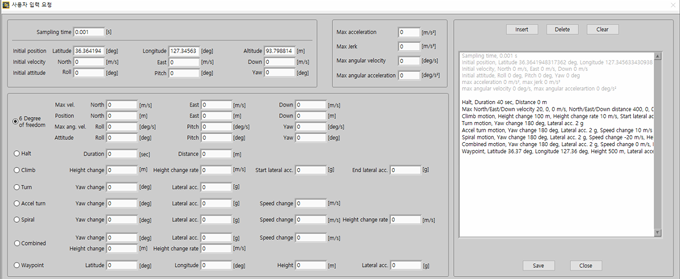
Fig. 7. Trajectory generator parameters setting.
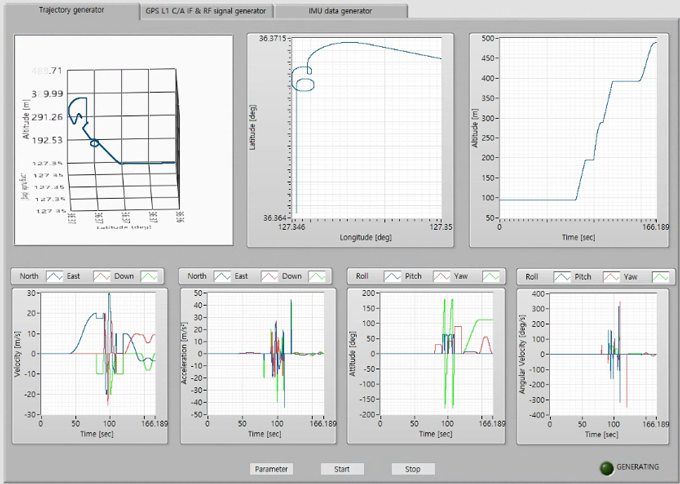
Fig. 8. Trajectory generation results display.
Fig. 9a는 GNSS IF 신호 및 데이터 생성기 파라미터 설정 화면, Fig. 9b는 IF-RF 상향변환기 파라미터 설정 화면이다. GNSS IF 신호 생성기 파라미터 설정 화면에서는 이온층 및 대류권 오차를 추가할 수 있으며, GNSS 안테나의 레버암, IF 주파수의 중심 주파수, 샘플링 주파수, 마스크 각 (mask angle), Analog digital conversion 비트 수, 가용 채널 수, 신호 종류를 선택할 수 있다. 그리고, ublox RINEX file 체크 박스를 선택하면 ublox 수신기의 실측 데이터로부터 생성한 RINEX 파일을 사용하거나 International GNSS Service (IGS)에서 제공한 RINEX 파일을 사용하여 ephemeris 데이터를 생성할 수 있다. GNSS IF 신호 생성기의 파라미터를 설정하고, GNSS IF 신호 생성기를 구동 시키면, Fig. 10과 같이 GPS IF 신호 생성 결과 및 IF-RF 상향변환기 파라미터 설정 표시 화면에서 GNSS 안테나의 위치와 속도, Skyplot과 C/N0를 확인할 수 있다. IF-RF 상향변환기 파라미터 설정 화면에서는 IF 신호 파일의 경로, 호스트 PC에서 IF-RF 상향변환기로 IF 데이터를 이동시킬 때 사용할 버퍼의 크기, IF 신호 파일에서 한번에 읽을 데이터의 크기, IF-RF 상향변환기에 설정할 파라미터인 장치 ID, 반송파 주파수, IQ율, 이득, 출력 포트를 설정할 수 있다. 생성한 RF에 대한 IF-RF 상향변환기에서 호스트 PC로 전달한 파라미터 설정 결과는 Fig. 10의 우측 상단에 표시한 화면을 통해 볼 수 있다.
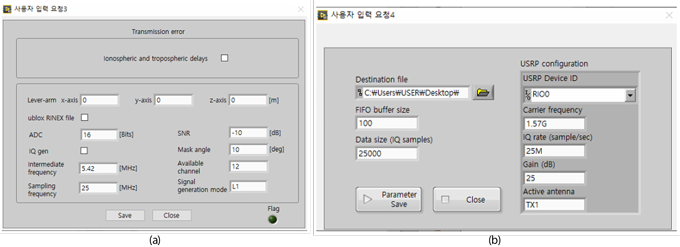
Fig. 9. (a) GNSS IF signal generator parameter setting. (b) IF-RF upconvertor parameter setting.
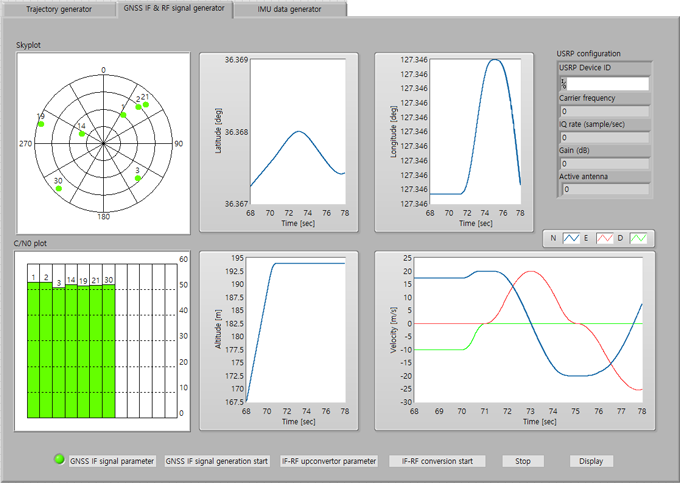
Fig. 10. GPS IF signal generation results and IF-RF upconvertor parameter setting results.
Fig. 11에 IMU 데이터 생성기 파라미터 설정 화면을 나타내었다. IMU 데이터 생성기 파라미터 설정 화면에서는 출력율, 측정범위, 잡음, 바이어스, 비정렬 오차, 환산계수 오차, 1차/2차 가우스 마코프 프로세스를 입력할 수 있으며, IMU 데이터 출력 I/F로 출력할 대상 IMU의 형식을 정할 수 있다. 오차를 추가하지 않고, 출력율을 100 Hz로 설정하여 IMU 생성기를 구동시키면, Fig. 12와 같이 IMU 데이터 생성 결과 표시 화면에서 시간에 따른 가속도계와 자이로 데이터를 확인할 수 있다. Fig. 11의 좌측 상단에서 원하는 IMU 데이터의 format을 선택하면 IMU 출력 I/F에서 해당 IMU의 통신 프로토콜을 이용한 IMU 데이터가 출력되며, 이를 상용 INS에 입력하면 항법 결과를 확인할 수 있다.
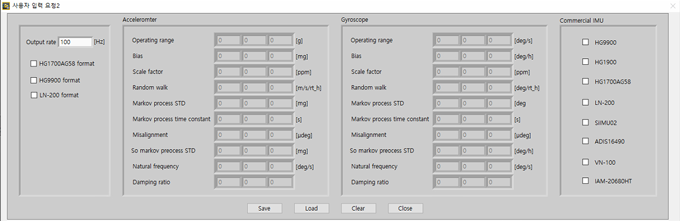
Fig. 11. IMU data generator parameter setting.
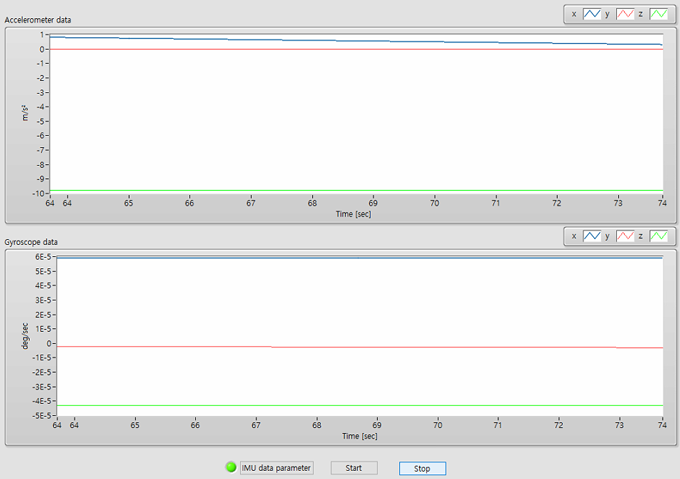
Fig. 12. IMU data generation results display.
GNSS 신호 생성기의 파라미터 설정 화면과 IMU 데이터 생성기의 파라미터 설정 화면에서 출력율, 측정 범위, 오차 특성과 신호 및 데이터 생성에 필요한 설정치를 입력할 수 있도록 구현하였으며, GNSS 신호 생성 결과와 IMU 데이터 생성 결과 표시 화면에서는 시간에 따라 GNSS 신호 생성 결과와 IMU 데이터 생성 결과를 보여줄 수 있도록 구현하였다.
신호 및 데이터 처리부 UI를 실행하고, GNSS SDR 탭의 파라미터를 선택하면, Fig. 13a에 나타낸 바와 같이 GPS SDR의 파라미터 설정 화면이 생성된다. 이를 통해 샘플링 주파수, IF 주파수, 신호 획득 임계값, 신호 추적 임계값, Frequency Locked Loop의 대역폭, Delay Locked Loop의 대역폭, 반송파 Numerically Controlled Oscillator (NCO) 비트 수, 코드 NCO 비트 수를 설정할 수 있다. 샘플링 주파수를 25 MHz, IF 주파수를 5.42 MHz, FLL 대역폭을 5 Hz, DLL 대역폭을 0.25 Hz, 반송파 NCO와 코드 NCO 비트 수를 30 비트로 설정하여 얻은 38~48초 사이의 GPS SDR 항법 결과를 Fig. 13b에 나타내었다. 이를 통해 시간에 따른 GPS SDR의 위치와 속도, C/N0, Skyplot을 확인할 수 있다.
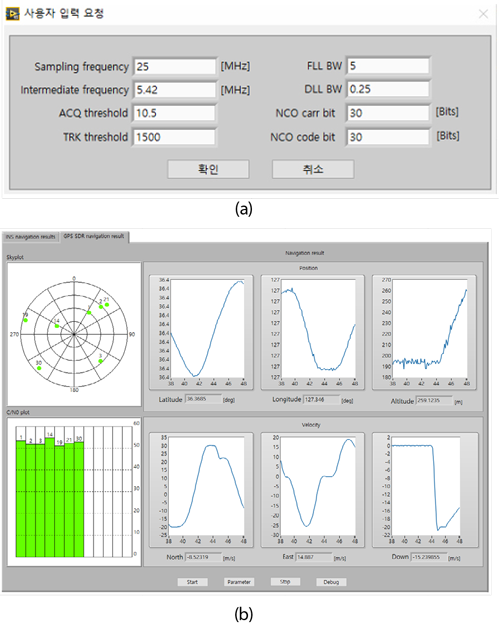
Fig. 13. (a) GPS SDR parameter setting, (b) GPS SDR navigation results display.
INS 탭의 파라미터를 선택하면, Fig. 14a에 나타낸 INS의 파라미터 설정 화면이 생성되는데, 이를 통해 초기 위치, 초기 속도, 초기 자세, INS 입력 I/F 형식, 통합항법 알고리즘의 통합 칼만필터의 초기 오차 공분산 행렬, 프로세스 잡음 공분산 행렬, 측정 잡음 공분산행렬도 입력할 수 있다. 초기 위치, 속도, 자세를 궤적 생성기에서 입력한 초기치와 동일하게 입력하여 INS 알고리즘을 구동하여 얻은 70~80초 사이의 INS 항법 결과를 Fig. 14b에 나타내었다. 이를 통해 시간에 따른 위치, 속도, 자세, 자세 지시계로 나타낸 운행 중인 항체의 자세를 확인할 수 있다.

Fig. 14. (a) INS parameter setting, (b) INS navigation results display.
본 논문에서는 다중 통합항법 시스템의 성능평가를 위한 UI 설계 방법을 제안하고, LabVIEW 기반의 UI 구현 결과를 제시하였다. 항법 시스템 성능평가 플랫폼 UI의 요구 조건, 이를 만족하기 위한 설계 기법을 제시하고, 대상이 GPS 수신기와 INS일때의 구현 예를 제시하였다. 제안한 방법으로 구현한 UI를 통해 파라미터를 설정하고, 항법 센서의 출력 생성 결과와 항법 결과를 보여줌으로써 UI가 효과적으로 GPS 수신기와 INS의 성능평가를 수행할 수 있음을 확인하였다.
추후에는 다중 안테나 수신기와 GNSS/INS 통합항법 알고리즘의 신호 및 데이터 생성기와 신호 및 데이터 처리 알고리즘으로 이루어진 성능평가 플랫폼에 대한 파라미터 설정과 신호 및 데이터 생성 결과, 항법 결과를 보여주는 UI를 구현할 것이다. 그리고, Graphic Processing Unit을 이용한 실시간 다중 항법 시스템의 성능평가 플랫폼에 대하여 신호 및 데이터 생성 결과와 항법 결과를 보여주는 UI를 구현할 예정이다.
Conceptualization, S. H. Oh and D.-H. Hwang; methodology, J. H. Son, J. Jung, S. H. Oh and D.-H. Hwang; software, J. H. Son and J. Jung; supervision, S. H. Oh, J. Park and D.-H. Hwang; writing – review & editing, D.-H. Hwang.
The authors declare no conflict of interest.
Han, S. J., Oh, S. H., Hwang, D.-H., & Lee, S. J. 2003, Monitoring System Design for the GPS/INS Integrated Navigation System, Journal of Institute of Control, Robotics and Systems, 9, 242-250. https://doi.org/10.5302/J.ICROS.2003.9.3.242
Khoiro, A., Arifin, I., Pratama, M., & Adianto, M. F. 2018, Design and Development Graphical User Interface on Inertial Navigation System of Submarine, in International Conference on Engineering, Advance Science and Industrial Application, 6-7 Sep 2018, Surabaya, Indonesia, pp.62-67. https://doi.org/10.12962/j23546026.y2019i3.5844
Kim, H., Lee, J., Oh, S. H., So, H., & Hwang, D.-H. 2018, Design of Navigation Environment Generation Module of M&S Software for Integrated Navigation System Performance Evaluation, Journal of Positioning, Navigation, and Timing, 7, 73-90. https://doi.org/10.11003/JPNT.2018.7.2.73
Kim, H., Lee, J., Oh, S. H., So, H., & Hwang, D.-H. 2019, Multi-Radio Integrated Navigation System M&S Software Design for GNSS Backup under Navigation Warfare, Electronics, 8, 188. https://doi.org/10.3390/electronics8020188
Lanagran-Soler, F., Vazquez, R., & Arahal, M. R. 2015, A Matlab Educational GUI for Analysis of GNSS Coverage and Precision, in IFAC Workshop on Internet Based Control Education IBCE15, 4-6 Nov 2015, Brescia, Italy, pp.93-98. https://doi.org/10.1016/j.ifacol.2015.11.219
Lee, S. H., Min, K. W., Kim, J. C., Kim, J. W., & Park, J. H. 2005, Technical Trend of Location-Based Service, Electronics and Telecommunications Trends, 20, 33-42. https://doi.org/10.22648/ETRI.2005.J.200305
Lim, S., Lim, D. W., Liu, M., Moon, S. W., Park, C., et al. 2008, Design of a Software-based Multi-Channel GNSS IF Signal Generator, in International Conference on Control, Automation and Systems 2008, 14-17 Oct 2008, Seoul, Korea, pp.754-758. https://doi.org/10.1109/ICCAS.2008.4694599
National Instruments 2005, LabVIEW User Manual, https://download.ni.com/support/manuals/374029a_0129.pdf
Peteovello, M. G. & Curran, J. T. 2017, Simulators and Test Equipment, Springer Handbook of Global Navigation Satellite Systems, P. J. G. Teunissen & O. Montenbruck, eds. (Gewerbestrasse, Switzerland: Springer).
Suprem, A., Deep, V., & Elarabi, T. 2016, Orientation and Displacement Detection for Smartphone Device Based IMUs, IEEE Access, 5, 987-997. https://doi.org/10.1109/ACCESS.2016.2631000