Bu-Gyeom Kim, Changdon Kee†
Department of Aerospace Engineering and SNU-IAMD, Seoul National University, Seoul 08826, Korea
†Corresponding Author: E-mail, kee@snu.ac.kr Tel: +82-2-880-1912 Fax: +82-2-878-0559
Citation: Kim, B.-G., Kee, C., 2024, Construction of Network RTK Testbed Using Reference Stations of NGII, Journal of Positioning, Navigation, and Timing, 13, 103-110.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 March, Volume 13, Issue 1, pages 103-110. https://doi.org/10.11003/JPNT.2024.13.1.103
Received on Feb 02, 2024, Revised on Feb 20, 2024, Accepted on Feb 21, 2024, Published on Mar 15, 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
In this paper, a test bed for real-time network Real-Time Kinematic (RTK) research was constructed using reference stations of the NGII. A group of candidate station networks was derived, including three stations in Seoul. The group consisted of four stations with a distance of less than 100 km between them. Among several candidates, a network composed of stations with short distances between them and demonstrating good data quality for all reference stations was selected as the test bed. After collecting real-time data in Radio Technical Committee for Maritime services (RTCM) format from the selected stations and conducting a noise analysis on measurements, mm-level carrier phase measurement noise was confirmed. Afterwards, the user set the reference station inside the test bed and analyzed the network RTK positioning performance of the MAC method using the GPS L1 frequency as post-processing. From the result of the analysis it was confirmed that the residual error for all users was within 10 cm after applying the correction. Additionally, after determining integer ambiguities through Leastsquares AMBiguity Decorrelation Adjustment (LAMBDA), it was confirmed that the fix rate was 100%, and all ambiguities were resolved as true values.
GNSS, network RTK, NGII, RTCM
다중 기준국기반의 cm급 정밀 항법 시스템인 network Real Time Kinematics (RTK)는 단일 기준국기반 RTK의 가용범위를 확장하기 위해 제안되었다 (Euler et al. 2001, Rizos & Han 2003). Network RTK는 보정정보 제공 방식에 따라 Virtual Reference Station (VRS), Flachen-Korrektur-Parameter (FKP), Master-Auxiliary Concept (MAC) 3가지로 분류된다 (Park & Kee 2010). VRS 방식은 기준국들의 측정치를 이용하여 사용자 위치에 가상 기준국 측정치를 만들어 보정정보로 제공한다. FKP는 주기준국의 측정치와 오차의 공간 분포 모델을 보정정보로 제공한다. 마지막으로 MAC 방식은 주기준국의 측정치와 주-부기준국의 측정치 차이를 보정정보로 제공한다. VRS 방식과 FKP 방식의 보정정보는 MAC 방식의 보정정보를 통해 생성할 수 있기 때문에, 설정한 기준국 네트워크에서 MAC 방식이 사용이 가능하다면 다른 두 방식도 사용 가능하다 (Takac & Zelzer 2008).
MAC 방식의 network RTK를 사용하기 위해선 주기준국 1개와 2개 이상의 부기준국으로 구성된 네트워크가 필요하다. 네트워크 구성시 기준국간 거리가 100 km 이내인 기준국을 사용하는 것을 권장한다 (Grejner-Brzezinska et al. 2005). 현재 국토지리정보원에서는 전국에 기준국을 설치하고 운영 중에 있다. 92개의 기준국이 균일하게 분포되어 있어 이를 사용하면 국내 특정 지역을 포함하는 네트워크를 구축할 수 있다. 또한 Network Transport of RTCM via Internet Protocol (NTRIP)을 통해 실시간 데이터를 RTCM 포맷으로 제공 중이다. 이러한 이유로 국토지리정보원의 기준국을 사용하면 국내 특정 지역을 포함하는 network RTK 연구를 위한 테스트베드를 구축할 수 있다. 구축된 테스트베드를 사용하면 기준국의 원시 데이터를 사용하여 보정정보 생성 및 사용자 측위 알고리즘에 대한 연구를 수행할 수 있다. 따라서 본 논문에서는 서비스 지역을 설정하고 국토지리정보원의 기준국을 사용하여 network RTK의 테스트베드를 구축하고 측위 성능을 분석한다.
서비스 지역을 설정했을 때 해당 지역을 포함하는 네트워크 후보는 다수 존재할 수 있다. Network RTK 사용을 위해선 네트워크를 구성하는 모든 기준국의 데이터 품질이 양호해야 한다. 데이터 품질은 UNAVCO 사의 Translation Editing and Quality Checking (TEQC) 프로그램을 이용하여 분석할 수 있다 (Estey & Meertens 1999). 국토지리정보원은 1일 간격으로 기준국의 데이터 품질 정보 파일을 제공하고 있으므로, 데이터 품질 비교를 통해 최종 네트워크를 선정한다. 네트워크 선정 후 각 기준국에서 Radio Technical Committee for Maritime services (RTCM) 3.2 포맷의 실시간 데이터를 수집하여 측정치 품질을 평가한다. 측정치 품질 평가는 잡음 분석을 통해 수행하며, 수집된 측정치로 정밀 측위가 가능한지 확인한다. 기준국 선정과 선정된 기준국들의 측정치 품질 분석 완료 후 최종적으로 테스트베드 내부에서 GPS L1 주파수 측정치를 사용한 후처리 network RTK 성능을 분석한다.
2장에서는 테스트베드 구축 과정을 서술하였다. 기준국들의 데이터 품질을 비교하여 최종적인 기준국 네트워크를 선정하였고, 선정된 기준국들의 실시간 데이터를 수집하여 측정치 품질을 분석하였다. 3장에서는 2장에서 선정된 기준국들의 데이터를 수집하여 테스트베드 내부의 후처리 network RTK 성능을 분석하였다. 4장에서는 결론 및 향후 계획에 대해 서술하였다.
국토지리정보원은 2023년 6월 15일 기준 92개의 기준국을 운영하고 있다. 수신기 기준으로 58개의 기준국은 Trimble, 나머지 34개 기준국은 Leica 장비를 사용하며, 이들의 위치는 Fig. 1에 나타낸 것과 같다. MAC 방식의 network RTK 보정정보는 기준국간 측정치 차이를 보정정보로 제공한다. 네트워크를 구성하는 기준국의 수신기 장비가 다르면 같은 위성 신호에 대해서도 측정치에서 차이가 발생할 수 있다 (Hauschild & Montenbruck 2016). 그로 인해 발생하는 문제를 예방하기 위해 본 논문에서는 다수의 기준국이 사용 중인 Trimble 사의 수신기를 사용하는 기준국만을 사용하여 테스트베드를 구축하였다.

Fig. 1. Reference station map.
사용자를 서울대학교와 3개의 서울시 기준국 (GUMC, SONP, YONS)로 설정했을 때, 서울대학교 기준 기준 반경 100 km 이내의 기준국은 17개이다. 본 논문에서는 주기준국 1개와 3개의 부기준국으로 네트워크를 구성하였다. 4개의 사용자 위치를 포함하여 주-부 기준국간 거리가 100 km 이하가 되도록 네트워크를 구성한 결과 약 80개의 후보가 도출되었다. Fig. 2는 그중 일부를 도시한 그림이다.
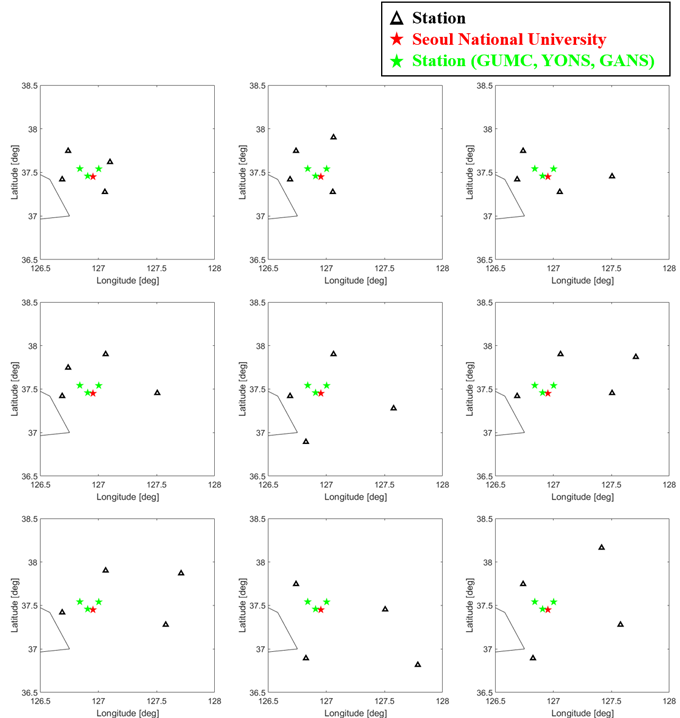
Fig. 2. Reference station network candidates for network RTK testbed.
기준국간 거리가 짧을수록 즉각적인 cm급 정밀 측위가 가능하다. 이러한 이유로 기준국간 거리가 30-70 km로 짧은 두 네트워크를 최종 후보로 선택하였다. Fig. 3은 선택한 두 후보를 도시한 그림이다. 그림을 통해 확인할 수 있듯이 후보 1은 PAJU, SUWN, INCH, SOUL 기준국의 조합이고 후보 2는 PAJU, SUWN, INCH, SOUL, DOND 기준국의 조합이다. 두 네트워크는 SOUL과 DOND 기준국을 제외하면 동일한 기준국을 사용한다. 두 후보 중 최종적으로 테스트베드에 사용될 네트워크는 데이터 품질 분석 결과를 참고하여 선정하였다.
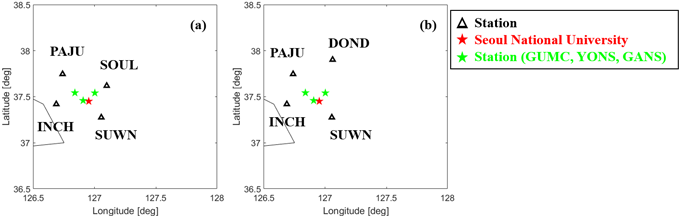
Fig. 3. Selected reference station network candidates. (a) candidate #1, (b) candidate #2.
국토지리정보원서 제공하는 2023년 9월 한달 동안의 데이터 품질 정보를 수집하여 분석한 결과는 Table 1과 같다. Table 1에서 “Ratio of complete to possible observations”은 예상되는 위성 신호 대비 실제 수집한 위성 신호의 비율을 의미하며, “MP1”은 GPS L1 주파수 의사거리 측정치 다중경로 오차를, “MP2”는 GPS L2 주파수의 것을 의미한다. “1,000 slips/o”은 반송파 위상 측정치 사이클 슬립 발생 횟수를 의미하며, 크기가 작을수록 발생 횟수가 적음을 의미한다. 표를 통해 선정한 기준국들의 데이터 품질과 Trimble 사의 장비를 사용하는 국내 기준국 전체에 대한 평균 데이터 품질을 확인할 수 있다. 먼저 공통 기준국 (PAJU, SUWN, INCH)의 데이터 품질을 확인했을 때 SUWN 기준국의 데이터 품질이 가장 우수하다. 따라서 SUWN 기준국을 network RTK의 주기준국으로 선정하였다. 두 네트워크 후보에서 차이인 두 기준국 (SOUL, DOND)에 대한 결과를 비교하면 DOND 기준국의 데이터 품질이 SOUL에 비해 좋은 것을 확인할 수 있다. 이러한 이유로 후보 2 (PAJU, SUWN, INCH, SOUL, DOND)를 최종적인 테스트베드의 네트워크로 선정하였다.
Table 1. Data quality of NGII reference stations (09/2023).
| Station | Ratio of complete to possible observations (%) | MP1 (m) | MP2 (m) | 1,000 slips/o | |
|---|---|---|---|---|---|
| Common | PAJU SUWN INCH | 90.1 93.9 87.6 | 0.6 0.2 0.6 | 0.5 0.3 0.6 | 3.1 1.9 7.4 |
| Candidate #1 | SOUL | 86.8 | 0.9 | 0.7 | 13.9 |
| Candidate #2 | DOND | 88.2 | 0.5 | 0.5 | 4.1 |
| Average of all stations using Trimble equipment | 90.5 | 0.5 | 0.4 | 4.0 | |
데이터 품질 정보는 기준국이 설치된 환경에 대한 평가 결과로, 그를 통해 전반적인 측정치의 품질을 예측할 수 있다. 그러나, 실제로 network RTK를 통해 정밀 측위가 가능하기 위해선 수집된 측정치의 품질이 적합한지 확인할 필요가 있다. 특히 반송파 위상 측정치 잡음 수준이 cm 수준을 만족해야 하므로 선정된 기준국들의 측정치를 수집하여 잡음을 분석하였다. 실시간 network RTK 연구를 위한 테스트베드 구축이 목표이기 때문에, 실시간 데이터의 측정치를 분석할 필요가 있다. 국토지리정보원은 GNSS 데이터 통합 센터의 NTRIP caster를 통해 각 기준국의 측정치를 실시간 RTCM 포맷의 데이터로 방송한다. 실시간 데이터는 국토지리정보원에서 제공한 NTRIP client 프로그램을 사용하면 수집할 수 있다. RTCM 포맷의 데이터 중 다중 위성군과 다중 주파수 측정치를 지원하는 RTCM 3.2의 데이터를 수집하여 분석하였다.
기준국에 추가적인 장비를 설치하여 데이터를 수집할 수 없기 때문에, 반송파 위상 측정치의 잡음을 직접 분석하는 데는 한계가 있다. 반송파 위상 측정치의 잡음 수준은 의사거리 측정치의 잡음 수준의 1/100로 알려져 있기 때문에, 의사거리 측정치의 잡음을 분석하여 반송파 위상 측정치 잡음 수준을 예측할 수 있다 (Kee et al. 1997). GPS L1 주파수의 의사거리 측정치 잡음 분석식은 다음과 같다.
$$\tilde{\varepsilon}_{L1}=\rho_{L1}-\phi_{L1}-2\dfrac{\phi_{L1}-\phi_{L2}}{\left(\frac{\lambda_{L1}}{\lambda_{L2}}\right)^2 -1}$$
$$\hat{\varepsilon}_{L1}=\tilde{\varepsilon}_{L1}-E[\tilde{\varepsilon}_{L1}]$$
Eq. (1)에서 $\varepsilon$는 의사거리 측정치 잡음을 의미하며, 아래 첨자는 주파수를 의미한다. $\rho$는 의사거리 측정치를, $\phi$는 반송파 위상 측정치를 의미하며, $\lambda$는 파장 길이를 의미한다. Eq. (2)에서 $E[\cdot]$는 평균을 나타내는 연사자이다. Eq. (2)의 좌변은 추정한 의사거리 측정치의 잡음 성분이다. 해당 추정 값을 위성 앙각에 따라 수집하여 표준편차를 계산하면 앙각에 따른 측정치 잡음의 크기를 계산할 수 있다. 그리고 계산된 측정치 잡음의 크기는 위성 앙각에 따른 함수로 모델링 할 수 있다 (Park 2008). Fig. 4는 각 기준국의 GPS L1 주파수 의사거리 측정치 잡음 분석 결과와 의사거리 측정치 잡음의 1/100을 수준으로 반송파 위상 측정치의 잡음 수준을 도시한 그래프이다.
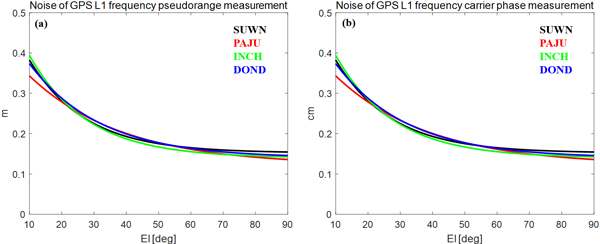
Fig. 4. Noise of GPS L1 frequency measurement. (a) pseudorange, (b) carrier phase.
그래프를 통해 확인할 수 있듯이 GPS L1 주파수 반송파 위상 측정치의 잡음 수준은 저앙각에서도 cm 수준이다. 이는 모든 기준국에서 공통적으로 확인된다. 측정치 잡음 분석 결과 선정한 기준국 네트워크를 통해 GPS L1 주파수를 사용한 network RTK 적용이 가능한 것으로 판단된다. 따라서 선정한 기준국 네트워크는 network RTK 연구를 위한 테스트베드로 사용할 수 있다고 판단되며, 3장에서는 테스트베드 내부 사용자의 network RTK 측위 성능을 분석하였다.
GPS L1 주파수 측정치의 network RTK 보정정보를 생성하였다. Eq. (3)은 기준국의 반송파 위상 측정치에 대한 식이다.
$\phi^j_M=d^j_M+\delta R^j_M-b^j+B_M-I^j_M+T^j_M+N^j_M \lambda + \varepsilon^j_M$
$$\phi^j_A=d^j_A+\delta R^j_A-b^j+B_A-I^j_A+T^j_A+N^j_A \lambda + \varepsilon^j_A$$
여기서 $d$는 위성과 기준국 사이 거리항을 의미하고, $\delta R$은 위성 궤도 오차를 의미한다. $b$와 $B$는 각각 위성과 수신기 시계 오차를 의미하고, $I$는 전리층 지연 오차를, $T$는 대류층 지연 오차를 의미한다. $N$은 미지 정수를 의미한다. 윗첨자($j$)는 위성을 아래첨자($M, A$)는 주-부기준국을 의미한다. MAC 방식의 network RTK 보정정보는 주기준국의 측정치로 생성되는 Carrier Phase Correction (CPC) 보정정보와 주-부기준국간 측정치 차이로 생성되는 Master-Auxiliary Correction (MAC) 보정정보로 구성된다. 주기준국의 CPC 보정정보는 방송 궤도력으로 계산한 위성의 위치와 시계 오차 보정정보를 사용하여 생성한다.
$$CPC^j_M=\phi^j_M-\left(\hat{d}^j_M-\hat{b}^j\right)$$
여기서 $\hat{d}$은 방송 궤도력을 사용하여 계산한 위성의 위치와 기준국 사이 거리항을 의미하고, $\hat{b}$은 위성 시계 오차 보정정보를 의미한다. 사용자에게 CPC 보정정보만을 제공할 경우 단일 기준국기반의 RTK와 동일하여 기준국과 사용자 사이 거리가 멀어질수록 보정정보 적용 후 잔여오차가 증가한다. MAC 보정정보는 CPC 보정정보 적용 후 잔여오차 제거를 위해서 제공되며, 주-부기준국간 CPC 보정정보의 차이로 계산된다.
$$MAC^j_A=CPC^j_M-CPC^j_A-Mj\Delta\nabla Arefn \lambda$$
여기서 $\Delta$는 기준국간 측정치 차분의 연산자를, $\nabla$은 위성간 차분의 연산자를 의미한다. Eq. (5)에서 확인할 수 있듯이 MAC 보정정보를 생성할 때 주-부기준국간 이중 차분 미지정수를 결정하여 제거해 준다. 사용자는 CPC 보정정보와 MAC 보정정보를 모두 받으면 두 보정정보를 조합하여 사용한다. 3개의 부기준국에서 MAC 보정정보 받는다고 가정할 경우 MAC 보정정보에 가중치를 곱하여 CPC 보정정보와 결합한다.
$$Corr^j=CPC^j_M+\sum^3_{k=1} w_{A,k}MAC^j_{A,k}$$
여기서 $w$는 가중치를 의미한다. MAC 보정정보 결합시에 사용되는 가중치는 여러 보간 기법을 통해서 계산할 수 있다. Network RTK에서 전통적으로 사용하는 보간 기법으로 Distance-based Interpolation Method (DIM), Low-order Surface Model (LSM), Linear Interpolation Model (LIM), 그리고 Linear Combination Model (LCM)이 있다. 어떤 기법을 사용하는지에 따라 사용자의 측위 성능이 다르며, DIM에 비해 다른 3개의 기법의 성능이 좋은 것으로 알려져 있다 (Dai et al. 2003). DIM을 제외한 3개의 기법의 성능은 유사하기 때문에, 본 논문에서는 LIM을 사용하였다. LIM은 오차 요소의 분포를 평면으로 가정한다. 주기준국의 위치를 원점으로 East North Up (ENU) 좌표계를 정의했을 때, 부기준국과 사용자의 위치를 통해 가중치를 계산할 수 있다.
$\bar{w}^T = \begin{bmatrix}
w_{A,1} & w_{A,2} & w_{A,3}
\end{bmatrix}^T = \begin{bmatrix}
X_{u} & Y_{u}
\end{bmatrix} (W^TW)W^T$
$$W=\begin{bmatrix}
X_{A,1} & X_{A,2} & X_{A,3} \\
Y_{A,1} & Y_{A,2} & Y_{A,3}
\end{bmatrix}^T$$
여기서 $X$와 $Y$는 주기준국 기준 ENU 좌표계에서 각각 동쪽, 북쪽 방향 좌표이다. 계산한 가중치를 이용하여 Eq. (6)과 같이 CPC와 MAC 보정정보를 결합한 것을 최종적으로 사용자의 측정치에 적용한다.
$$^j\nabla^{ref}_u \delta\phi = \left(\phi^j_u – Corr^j\right) – \left(\phi^{ref}_u – Corr^{ref}\right)$$
Eq. (8)은 사용자 측정치에 보정정보를 적용하고 위성간 차분을 한 측정치로 사용자는 해당 측정치를 사용하여 least-squares AMBiguity decorrelation adjustment (LAMBDA)를 통해 미지 정수를 결정한 후 자신의 위치를 계산한다 (Teunissen et al. 1997).
테스트베드 내부 network RTK의 측위 성능은 3개의 서울시 기준국 (GUMC, YONS, GANS)를 사용자로 설정하여 분석하였다. 2023년 9월 25일 18~19 사이 기준국들의 RTCM 3.2 포맷의 실시간 데이터를 수집하였다. 데이터에 포함된 다중 위성군, 다중 주파수 측정치 중 GPS L1 주파수의 측정치만을 사용하였고, mask angle은 15도로 설정하였다. Fig. 5는 데이터 수집 환경을 정리한 것과 위성의 skyplot을 도시한 그림이고, Table 2는 기준국들의 장비 및 주기준국과의 기선 거리를 정리한 표이다.
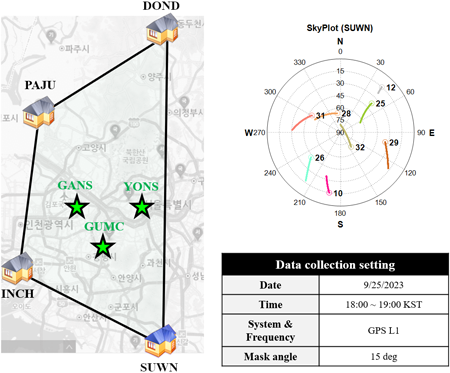
Fig. 5. Data collection setting and skyplot of master station.
Table 2. Information of reference stations.
| Station | Receiver | Antenna | Baseline from mater station (km) | |
|---|---|---|---|---|
| Testbed | SUWN (master) PAJU INCH DOND | TRIMBLE NET R9 TRIMBLE NET R9 TRIMBLE NET R9 TRIMBLE NET R9 | TRM59800.00 SCIS TRM59800.00 SCIS TRM59800.00 SCIS TRM59800.00 SCIS | (-) 59 36 70 |
| User | GUMC YONS GANS | TRIMBLE ALLOY TRIMBLE ALLOY TRIMBLE ALLOY | TRM159900.00 SCIS TRM159900.00 SCIS TRM159900.00 SCIS | 24 30 35 |
미지 정수 결정 이전 보정정보 적용 결과 사용자 측정치의 잔여 오차를 분석하였다. 기준국을 사용자로 설정하였기 때문에 위치 참값을 사용하여 거리항을 계산하였고, batch 프로세스를 통해 미지 정수를 사전에 결정한 것을 Eq. (8)의 측정치에서 제거하여 잔여 오차를 계산하였다.
$$ res^j = ^j\nabla^{ref}_u \delta\phi – uj\Delta\nabla Mrefd – uj\Delta\nabla MrefN\lambda$$
LAMBDA를 통한 미지 정수 결정 결과가 참값과 일치하기 위해선 잔여 오차가 사용 측정치 파장의 절반 이하를 만족해야 한다. GPS L1 주파수의 파장 길이는 19 cm이기 때문에, 잔여오차가 10 cm 이하가 되어야 한다. Fig. 6은 사용자의 잔여 오차를 도시한 그래프이다.
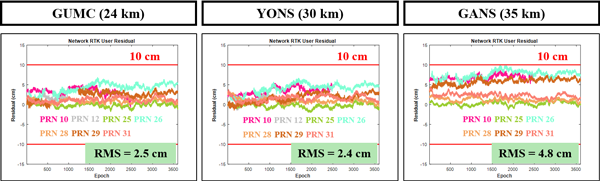
Fig. 6. Residual error of each user.
Fig. 6을 통해 확인할 수 있듯이 모든 사용자의 잔여 오차가 10 cm 이하를 만족하였다. 각 그래프의 제목에서 괄호안의 숫자는 주기준국으로부터의 기선 거리를 의미한다. 이를 통해 미지 정수가 모두 참값으로 결정될 것으로 예상할 수 있었다. 잔여 오차 분석 이후 Eq. (8)의 측정치에 매 epoch LAMBDA를 적용하여 미지 정수를 결정하였다. 그리고 그 결과를 잔여 오차 계산시 사용한 batch로 결정된 미지 정수와 비교하였다.
Fig. 7은 3가지 색을 활용하여 각 epoch에서 미지 정수 결정 결과를 파이 그래프로 표시하였다. 검은색은 미지 정수를 결정할 수 없는 epoch의 비율을 의미하고, 초록색은 결정 결과 batch 미지 정수와 일치하는 epoch의 비율을, 빨간색은 결정 결과 batch 미지 정수와 일치하는 않는 epoch의 비율을 의미한다. 분석 결과 모든 사용자에 대해서 모든 epoch에서 미지 정수가 batch 미지 정수와 일치하였기 때문에, 파이 그래프가 초록색 영역만 있는 것을 확인할 수 있다. 결정된 미지 정수를 이용하여 사용자 위치를 계산한 결과 Fig. 8과 같다.
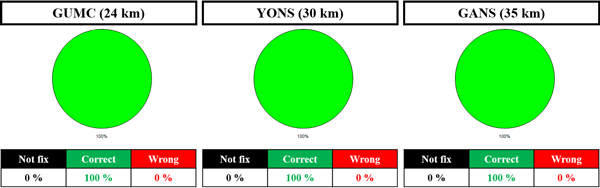
Fig. 7. Ambiguity resolution results of each user.
Fig. 8은 사용자의 수평 위치 오차를 도시한 그래프이며, 기준국을 사용자로 설정했기 때문에 위치 참값은 기준국의 위치를 사용하였다. 3개의 사용자 모두 수평 위치 오차가 5 cm 이내로 계산된 것을 확인할 수 있다. 이처럼 설정한 기준국 네트워크 내부에서 실시간 데이터를 수집하여 MAC 방식의 network RTK 보정정보 적용 후처리 측위 결과 cm급 측위가 가능한 것을 확인할 수 있다.
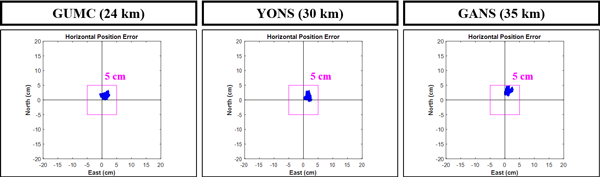
Fig. 8. Horizontal position error of each user.
본 논문에서는 국토지리정보원의 기준국을 사용하여 실시간 network RTK 연구를 위한 테스트베드를 구축하였다. 서비스 지역을 설정하고, 해당 지역을 포함하며 기준국간 거리가 100 km 이하가 되는 기준국 4개로 구성된 네트워크 후보를 도출한다. 여러 후보 중 기준국간 거리가 짧으며, 데이터 품질이 양호한 기준국들로 구성된 네트워크를 테스트베드로 설정하였다. 이후 실시간 RTCM 포맷의 데이터를 수집하여 잡음 분석을 통해 측정치 품질 분석을 수행하였고, 테스트베드 내부에 사용자를 설정하여 후처리로 network RTK 사용자 측위 성능을 분석하였다.
서비스 지역을 서울대학교와 서울시 기준국 3개 (GUMC, YONS, GANS)를 포함하는 영역을 설정하였을 때, 약 80개의 네트워크 후보가 도출되었다. 그중에서 기준국간 거리가 짧은 2개의 후보를 선택했는데, 두 후보군은 PAJU, SUWN, INCH 기준국을 공통으로 하고 각각 SOUL, DOND 기준국을 사용하여 구성된다. 두 후보 중 최종 테스트베드로 사용될 네트워크는 국토지리정보원 홈페이지에서 제공하는 데이터 품질 분석 결과를 비교하여 선정하였다. 먼저 3개의 공통 기준국 중 가장 데이터 품질이 우수한 SUWN 기준국을 주기준국으로 선정하였다. 그리고 SOUL과 DOND 기준국의 데이터 품질을 비교했을 때 DOND 기준국의 데이터 품질이 좋은 것으로 확인되어, DOND 기준국을 사용하는 네트워크를 최종 테스트베드로 선정하였다. 이후 선정된 기준국에서 RTCM 3.2 포맷의 실시간 데이터를 수집하고 측정치 잡음을 분석하였다. 반송파 위상 측정치의 잡음은 의사거리 측정치 잡음의 1/100 수준이기 때문에, 의사거리 측정치의 잡음 분석한 결과를 통해 cm 수준의 반송파 위상 측정치 잡음 수준을 확인할 수 있었다.
테스트베드 내부 서울시 기준국 3개 (GUMC, YONS, GANS)를 사용자로 설정하여 MAC 방식의 network RTK를 적용하여 사용자 측위 성능을 분석하였다. 각 기준국에서 RTCM 포맷의 실시간 데이터를 수집하여 GPS L1 측정치의 network RTK 보정정보를 생성하였고, LIM을 통해 가중치를 계산하여 사용자 측정치에 보정정보를 적용하였다. 사용자 측정치 잔여 오차 분석 결과 모든 사용자의 잔여 오차가 10 cm 이내를 만족하는 것을 확인할 수 있었다. 그리고 매 epoch LAMBDA를 통해 미지 정수를 결정한 결과 모든 사용자에서 100% 미지 정수 결정 및 모든 미지 정수가 참값으로 결정되는 결과를 확인할 수 있었다.
분석 결과를 통해 설정한 기준국 네트워크를 실시간 network RTK 연구를 위한 테스트베드로 사용 가능함을 확인하였다. 본 논문에서는 network RTK 적용 가능성만을 확인하기 위해 GPS L1 주파수의 측정치를 후처리로 사용하였다. 그러나 RTCM 3.2 포맷의 실시간 데이터를 수집하면 다중 위성군, 다중 주파수의 측정치 사용이 가능하다. 따라서 향후 연구에서는 테스트베드 내부의 실시간 다중 위성군, 다중 주파수의 network RTK 성능을 분석할 계획이다.
This research was supported by Unmanned Vehicles Core Technology Research and Development Program through the National Research Foundation of Korea (NRF), Unmanned Vehicle Advanced Research Center (UVARC) funded by the Ministry of Science and ICT, the Republic of Korea, contracted through by SNU Future Innovation Institute (No. 2020M3C1C1A01086407). This research was supported (in part) by the Institute of Advanced Aerospace Technology at Seoul National University. The Institute of Engineering Research at Seoul National University provided research facilities for this work.
Conceptualization, B.G.; methodology, B.G.; software, B.G.; validation, B.G. and C.D.; formal analysis, B.G.; investigation, B.G.; resources, B.G.; data curation, B.G.; writing—original draft preparation, B.G.; writing—review and editing, B.G.; visualization, B.G.; supervision, C.D.; project administration, C.D.; funding acquisition, C.D.
The authors declare no conflict of interest.
Dai, L., Han, S., Wang, J., & Rizos, C. 2003, Comparison of interpolation algorithms in network-based GPS techniques, Navigation, Journal of the Institute of Navigation, 50, 277-293. https://doi.org/10.1002/j.2161-4296.2003.tb00335.x
Estey, L. H. & Meertens, C. M. 1999, TEQC: The Multi-Purpose Toolkit for GPS/GLONASS Data, GPS Solutions, 3, 42-49. https://doi.org/10.1007/PL00012778
Euler, H.-J., Keenan, C. R., Zebhauser, B. E., & Wübbena, G. 2001, Study of a Simplified Approach in Utilizing Information from Permanent Reference Station Arrays, In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2001), Salt Lake City, Utah, 11-14 September 2001, pp.379-391.
Grejner-Brzezinska, D. A., Kashani, I., & Wielgosz, P. 2005, On accuracy and reliability of instantaneous network RTK as a function of network geometry, station separation, and data processing strategy, GPS Solutions, 9, 212-225. https://doi.org/10.1007/s10291-005-0130-1
Hauschild, A. & Montenbruck, O. 2016, A study on the dependency of GNSS pseudorange biases on correlator spacing, GPS Solutions, 20, 159-171. https://doi.org/10.1007/s10291-014-0426-0
Kee, C., Walter, T., Enge, P., & Parkinson, B. 1997, Quality control algorithms on WAAS wide-area reference stations, Journal of the Institute of Navigation, 44, 53-62. https://doi.org/10.1002/j.2161-4296.1997.tb01939.x
Park, B. 2008, Study on reducing temporal and spatial decorrelation effect in GNSS augmentation system: consideration of the correction message standardization, PhD Dissertation, Seoul National University.
Park, B. & Kee, C. 2010, The compact network RTK method: An effective solution to reduce GNSS temporal and spatial decorrelation error, Journal of Navigation, 63, 343-362. https://doi.org/10.1017/S0373463309990440
Rizos, C. & Han, S. 2003, Reference station network based RTK systems-concepts and progress, Wuhan University Journal of Natural Sciences, 8, 566-574. https://doi.org/10.1007/bf02899820
Takac, F. & Zelzer, O. 2008, The relationship between network RTK solutions MAC, VRSTM, PRS, FKP and i-MAX, In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, Georgia, 16-19 September 2008, pp.348-355.
Teunissen, P. J. G., De Jonge, P. J., & Tiberius, C. C. J. M. 1997, Performance of the LAMBDA Method for Fast GPS Ambiguity Resolution, Journal of the Institute of Navigation, 44, 373-383. https://doi.org/10.1002/j.2161-4296.1997.tb02355.x