Citation: Lee, H., Kim, S., Park, J., Jeong, S., Park, S., Yu, J., Choi, H., & Seo, J., 2024, A Survey on New Parameters of GPS CNAV/CNAV-2 and Their Roles, Journal of Positioning, Navigation, and Timing, 13, 45-52.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 March, Volume 13, Issue 1, pages 45-52. https://doi.org/10.11003/JPNT.2024.13.1.45
Received on 15 December 2023, Revised on 18 January 2024, Accepted on 25 January 2024, Published on 15 March 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/bync/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Halim Lee1, Sanghyun Kim1, Jongmin Park1, Suhui Jeong1, Seunghyeon Park1, Jaewon Yu1, Heonho Choi2, Jiwon Seo1,3†
1School of Integrated Technology, Yonsei University, Incheon 21983, South Korea
2Korea Aerospace Research Institute, Daejeon 34133, South Korea
3Department of Convergence IT Engineering, Pohang University of Science and Technology, Pohang 37673, South Korea
†Corresponding Author: E-mail, jiwon.seo@yonsei.ac.kr Tel: +82-32-749-5833 Fax: +82-32-818-5801
As part of the Global Positioning System (GPS) modernization program in the United States, Civil Navigation (CNAV) and CNAV-2 messages were developed to introduce flexibility and modern features to the Legacy Navigation (LNAV) message. This paper explores the additional parameters introduced in CNAV/CNAV-2 compared to LNAV, focusing on their roles from the user’s perspective. This paper compares the structural and parameter differences among LNAV, CNAV, and CNAV-2. Additionally, we analyze the types and roles of parameters newly incorporated into CNAV/CNAV-2 that were absent in LNAV.
CNAV, CNAV-2, LNAV, navigation message
1990년대부터 본격적으로 운영되기 시작한 미국의 Global Positioning System (GPS)는 국방에서부터 민간에 이르기까지 다양한 응용 분야에서 필수적인 기술로 자리매김하였다. 높은 수요에 힘입어, 1990년대 후반부터 미국 정부는 전반적인 시스템의 성능을 높이고 사용자에게 더 유용한 기능 제공할 수 있도록 하는 GPS 현대화 프로그램을 진행하고 있다 (Misra & Enge 2006, GPS Official Website 2023). 이에 따라, 기존에 사용되던 Legacy Navigation (LNAV) 메시지를 발전시킨 형태의 항법메시지인 Civil Navigation (CNAV)와 CNAV-2가 차례로 개발되었다. 2014년 4월부터 미 공군에서는 실제 위성 신호 (L2C와 L5 신호)에 CNAV를 실어서 전송하기 시작하였으며, 현재 L2C와 L5 신호는 pre-operational 상태로 분류되고 있다 (GPS Official Website 2023). L2C와 L5 신호에 대한 완전 운영은 차세대 제어시스템 (Next Generation Operational Control System, OCX)의 Block 1이 개발 완료된 이후에 이루어질 전망이다 (GPS Official Website 2023). 한편, L1C 신호의 경우 현재 개발 단계에 있다 (GPS Official Website 2023).
GPS CNAV/CNAV-2는 다양한 항법메시지 파라미터를 가변적으로 포함할 수 있도록 설계되어 LNAV 보다 높은 유연성을 제공한다 (Steigenberger et al. 2015). 또한, CNAV/CNAV-2에는 기존 LNAV에서 사용되던 항법메시지 파라미터에 더해 Earth Orientation 파라미터 (Earth Orientation Parameter, EOP), 차등 보정 (differential correction) 파라미터 등 추가적인 파라미터가 도입되었다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
GPS CNAV/CNAV-2를 활용하기 위해서는 기존에 사용되던 LNAV와 비교하여 CNAV/CNAV-2에는 어떤 특징이 추가되었는지 비교 분석할 필요가 있다. 본 논문에서는 LNAV와 비교하여 CNAV/CNAV-2에는 어떤 종류의 파라미터들이 추가되었으며, 사용자 관점에서 이러한 파라미터의 역할이 무엇인지 조사하였다.
본 논문의 2장에서는 LNAV와 CNAV, CNAV-2의 구조 및 파라미터 구성의 차이점을 비교하였다. 이후, 3장에서는 LNAV에는 포함되지 않았지만 CNAV/CNAV-2에 새롭게 추가된 파라미터의 종류와 역할을 분석하였다. 마지막으로 4장에서는 본 논문의 결론을 제시하였다.
Figs. 1a-c는 각각 LNAV와 CNAV, CNAV-2의 구조를 나타낸다. 최초의 GPS 항법메시지인 LNAV는 프레임 구조이며, LNAV의 한 프레임은 5개의 서브프레임으로 구성된다 (Misra & Enge 2006). 1~3 서브프레임은 해당 위성의 궤도 및 위성시계 정보를 전송하고, 4~5 서브프레임은 알마낙과 다른 정보들을 전송하는 고정된 구조를 지닌다 (Misra & Enge 2006).
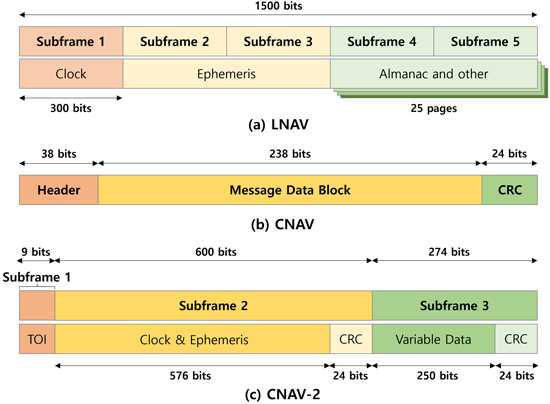
Fig. 1. Message structures of (a) LNAV, (b) CNAV, and (c) CNAV-2. Figs. 1 (a) and (b) are reproductions of Fig. 1 in Steigenberger et al. (2015).
한편, CNAV는 LNAV에 비해 유연한 구조를 가지고 있다 (Steigenberger et al. 2015). 하나의 패킷은 크게 메시지 헤더, 메시지 데이터 블록, cyclic redundancy check (CRC) Parity 블록으로 구성되며, 메시지 데이터 블록에 항법에 필요한 정보를 인코딩한다 (IS-GPS-200N 2022, IS-GPS-705J 2022). CNAV가 개발된 이후에는, 프레임 구조에 유연성을 더한 CNAV-2 항법메시지가 개발되었다. CNAV-2 항법 메시지는 프레임 구조이지만, 서브프레임 1과 2는 위성 시각 및 궤도력 정보를 고정적으로 포함하고, 서브프레임 3은 필요에 따라 적절한 정보를 포함할 수 있도록 하여 유연성을 증가시켰다 (IS-GPS-800J 2022). CNAV와 CNAV-2는 유연한 구조를 가지므로, 보다 다양한 파라미터를 가변적으로 포함할 수 있다는 장점이 있다.
GPS LNAV에 포함되는 항법메시지 파라미터에는 위성 시계 보정 (satellite clock correction), 건강 (health) 상태, 궤도력 (ephemeris), 전리층 보정 (ionospheric correction), UTC, 알마낙 파라미터 등이 있다. GPS CNAV/CNAV-2의 경우, LNAV에 포함되는 파라미터 외에도 군 지연 보정 (group delay correction) 파라미터 중 신호간 보정 (inter-signal correction, ISC) 파라미터, 축소된 알마낙 (reduced almanac) 파라미터, 차등 보정 파라미터, GPS/global navigation satellite system (GNSS) 시각 오프셋 (GPS/GNSS time offset, GGTO) 파라미터 등을 추가로 포함한다. GPS CNAV/CNAV-2에 포함되는 파라미터를 정리하면 Table 1과 같다. Table 1에서 LNAV에는 포함되지 않으나 CNAV/CNAV-2에서 새롭게 추가된 파라미터에 해당되는 경우 배경을 회색으로 표시하였다.
Table 1. Navigation parameters in CNAV/CNAV-2. Grayed-out background indicates parameters absent in LNAV.
| CNAV/CNAV-2 Navigation parameters | |
| Clock | Ephemeris |
| SV health | Ionospheric correction |
| Group delay correction (TGD) | Group delay correction (ISC) |
| Reduced almanac | Midi almanac |
| Earth orientation | UTC |
| Differential correction | GPS/GNSS time offset |
| Integrity support message | Text |
| SV configuration | |
기존 LNAV에도 존재하는 파라미터 중 CNAV/CNAV-2에서 일부 성능 개선이 이루어진 파라미터도 있다. 예를 들어, CNAV/CNAV-2에 포함되는 궤도력 파라미터는 LNAV의 궤도력 파라미터 보다 더 많은 세부 파라미터를 포함하며, 더 정밀한 값을 표현할 수 있다 (Steigenberger et al. 2015). LNAV와 비교하였을 때, CNAV/CNAV-2의 궤도력 파라미터는 장반경의 변화율 (change rate in semi-major axis), 평균 운동차율 (rate of mean motion difference) 등의 파라미터를 추가로 포함한다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
또한, GPST와 UTC 간의 시각 오프셋 (clock offset) 보정 항을 제공하는 UTC 파라미터의 경우, 일차다항식 모델에 해당하는 두 개의 항만 포함하는 LNAV와 달리, CNAV/CNAV-2는 이차다항식 모델에 해당하는 세 개의 항을 포함한다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
그러나 본 논문에서는 LNAV에 존재하는 파라미터가 CNAV/CNAV-2로 발전하면서 일부 개선된 경우를 제외하고, LNAV에는 포함되지 않았지만 CNAV/CNAV-2에서 새롭게 추가된 파라미터에 대해 주로 다룬다. 본 논문의 3장에서는 새로 추가된 CNAV/CNAV-2 파라미터의 종류와 역할에 대해 서술하였다.
군 지연 보정 파라미터는 신호의 종류에 따라 달라지는 군 지연 바이어스의 차이를 보정해주기 위해 필요하다. 군 지연은 위성의 안테나에서 방사된 출력 신호와 위성의 온 보드 (on-board) 주파수 원의 출력 신호 사이의 시간 지연 (delay)으로 정의된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022). 군 지연은 RF 케이블, 증폭기, 혼합기 등 위성에 탑재된 하드웨어에 의한 위상 왜곡(phase distortion)에 의해 발생한다 (Zhu et al. 2008). 신호의 지연 정도는 주파수 의존적이며 (Zhu et al. 2008), 위성마다 다른 값을 가진다 (Wilson et al. 1999).
GPS의 경우, 위성의 시계 보정 파라미터는 L1 P(Y)와 L2 P(Y) 이중주파수 코드 측정값을 기반으로 생성된다. 따라서, L1 P(Y)와 L2 P(Y) 이중주파수 사용자가 아닌, 단일주파수 사용자 혹은 기타 이중주파수 사용자(L1 C/A와 L2C 등)의 경우에는 군 지연 보정값 (differential group delay, DGD)를 적용해야 한다 (Martini et al. 2020).
군 지연 보정 파라미터는 크게 두 종류 (TGD와 ISC)로 분류될 수 있다. TGD는 CNAV가 사용되기 전부터 LNAV에서 L1 단일주파수와 L2 단일주파수 사용자의 군 지연 보정을 위해 제공되고 있던 파라미터이다. ISC 파라미터는 기타 이중주파수 사용자를 위하여 CNAV에 추가적으로 도입되었다.
ISC 파라미터는 총 6종류(ISCL1C/A,ISCL1CP,ISCL1CD,ISCL2C,ISCL5I5,ISCL5Q5)가 있으며, 순서대로 L1 P(Y) 신호와 L1 C/A, L1CP, L1CD, L2C, L5I5, L5Q5 신호 간의 평균적인 군 지연 차이값을 나타낸다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022). Fig. 2는 각 신호에 대한 TGD와 ISC의 관계를 나타낸다. 단일주파수 사용자는 L1 P(Y)와 L2 P(Y) 이중주파수 측정값을 바탕으로 계산되는 위성 시계 보정 파라미터를 적용한 이후 (Fig. 2의 가장 아래 기준선)에 TGD와 ISC 보정값을 적용해야 한다.
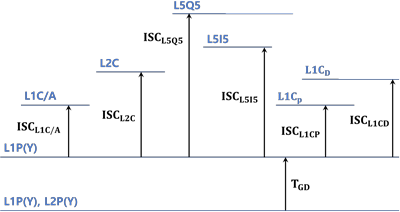
Fig. 2. Relationship between TGD and ISCs for each signal. Note that arrow size does not represent actual ISC and TGD values. This figure is a reproduction of Fig. 3 in Martini et al. (2020).
L1C (CNAV-2)의 경우 서브프레임 2에서 2개의 ISC 파라미터 (ISCL1CP,ISCL1CD)를 포함하며, 서브프레임 3의 페이지 1에서 4개의 ISC 파라미터 (ISCL1C/A,ISCL2C,ISCL5I5,ISCL5Q5)를 포함한다 (IS-GPS-800J 2022). CNAV (L2-CNAV, L5-CNAV)는 메시지 타입 30에서 4개의 ISC 파라미터 (TGD,ISCL1C/A,ISCL2C,ISCL5I5,ISCL5Q5)를 포함한다 (IS-GPS-200N 2022, IS-GPS-705J 2022). 여기서 LICP란 L1C 반송파 (carrier)에 데이터 메시지가 변조되지 않은 신호 (즉, 파일럿 (pilot) 신호)를 뜻하며, LICD란 L1C 반송파에 데이터 메시지가 변조된 신호를 뜻한다.
Earth Orientation 파라미터는 Earth-Centered Earth-Fixed (ECEF) 좌표와 Earth-Centered Inertial (ECI) 좌표 간의 변환을 위해 필요하다. 특히, EOP는 저궤도 위성과 우주 정거장 등 우주 환경 (space-borne)의 GNSS 어플리케이션에 필수적이다 (Steigenberger et al. 2022). 우주 환경의 spacecraft의 궤도 계산 및 예측은 주로 ECI 좌표계 상에서 이루어지므로 (Steigenberger et al. 2022), ECEF 좌표계로 산출되는 항법해를 ECI 좌표로 변환해주는 과정이 필요하다.
LNAV를 사용할 경우, 사용자는 GPS 수신기 외부에서 EOP 데이터를 전달받아 좌표를 변환하였다 (Kim et al. 2013). 그러나, CNAV를 사용할 경우, 항법메시지에 EOP가 포함되어 있으므로 외부의 도움 없이도 GPS 수신기 단독으로 좌표 변환이 가능하다.
Earth Orientation 파라미터는 L1C (CNAV-2)의 서브프레임 3, 페이지 2와 CNAV (L2-CNAV, L5-CNAV)의 메시지 타입 32에 포함된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
Earth Orientation 파라미터는 총 7개의 세부 파라미터로 구성된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022). GPS interface specification (IS) 문서 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022) 상의 각 세부 파라미터의 정의는 Table 2와 같다.
Table 2. Earth orientation parameters. All definitions are from GPS IS documents (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
| Usage | Parameter | Definition |
| Reference time calculation | tEOP ∆UTGPS ∆UTGPS | EOP data reference time UT1-GPS difference at tEOP Rate of UT1-GPS difference at tEOP |
| Polar motion calculation | PM_X PM_Y $\dot{\mathrm{PM\_X}}$ $\dot{\mathrm{PM\_Y}}$ | X-axis polar motion at tEOP Y-axis polar motion at tEOP X-axis polar motion drift at tEOP Y-axis polar motion drift at tEOP |
차등 보정 파라미터는 차등 보정 파라미터를 방송하는 위성이 아닌 다른 위성의 궤도력 파라미터 및 위성 시계 보정 파라미터를 보정하기 위한 파라미터이다. 항법메시지 데이터는 위성별로 서로 다른 시점에 업로드 될 수 있다. 따라서, 비교적 최근에 업로드가 이루어진 위성의 경우, 업로드로부터 오랜 시간이 지난 타 위성에 비해 최신 궤도력 및 위성 시계 보정 정보를 포함할 수 있다. 이러한 점을 이용하여 차등 보정 파라미터는 타 위성의 오래된 궤도력 및 위성 시계 파라미터를 보정할 수 있도록 한다.
항법메시지 데이터는 지상의 Monitor Station (MS)에서 수집한 데이터를 바탕으로 Master Control Station (MCS)에서 생성되고 Control Segment (CS)에서 위성으로 업로드 된다 (Creel et al. 2006). 이 때, 항법메시지 데이터의 Age of Data (AOD)가 증가함에 따라 항법 성능이 저하되며, 항법 성능을 유지하기 위해서는 주기적으로 새로운 항법메시지 데이터를 위성에 업로드하여야 한다 (GPS SPS 2020). 그러나, 주기적인 항법메시지 업로드에도 불구하고, 최근 업로드 시점으로부터 오랜 시간이 흐르게 되면 점진적으로 항법 오차가 누적된다.
차등 보정 파라미터는 이러한 오차를 보정해주기 위한 파라미터로, 사용자는 차등 보정 파라미터를 통해 궤도력 및 위성 시계 보정 파라미터를 보정하여 항법 오차를 줄일 수 있다. 차등 보정 파라미터는 궤도력 및 위성 시계 보정 파라미터를 보정하기 위한 파라미터이므로, 보정하려는 궤도력 및 위성 시계 보정 파라미터보다 차등 보정 파라미터가 더 오래된 데이터일 경우, 차등 보정 파라미터를 사용하지 않는다. 차등 보정 파라미터는 궤도력 및 위성 시계 보정 파라미터와 마찬가지로 CS에서 위성으로 업로드 되며, 차등 보정 파라미터의 사용 여부 또한 CS에 의해 결정된다 (IS-GPS-200N 2022).
차등 보정 파라미터는 L1C (CNAV-2)의 서브프레임 3, 페이지 5와 CNAV (L2-CNAV, L5-CNAV)의 메시지 타입 34, 13, 14에 포함된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022). 차등 보정 파라미터는 크게 위성 시계 보정 파라미터를 보정하기 위한 Clock Differential Correction (CDC) 파라미터, 궤도력 파라미터를 보정하기 위한 Ephemeris Differential Correction (EDC) 파라미터로 나뉜다. GPS IS 문서 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022) 상의 각 세부 파라미터의 정의는 Table 3과 같다. CDC 파라미터의 경우, clock bias 와 clock drift에 해당하는 보정 항(Table 3에서 각각 {\delta a}_{f0}와 {\delta a}_{f1})만을 제공한다. 따라서, CDC 파라미터를 이용할 경우, 사용자는 위성 시계 보정 파라미터 중 clock drift rate 항을 제외한 clock bias 항과 clock drift 항을 보정할 수 있다.
Table 3. Differential correction parameters. All definitions are from GPS IS documents (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
| Usage | Parameter | Definition |
| PRN ID | PRN ID that corresponds to the differential correction data | |
| User range accuracy (URA) calculation | UDRA $\dot{\mathrm{UDRA}}$ | User differential range accuracy index Change rate of UDRA |
| Data generation time calculation | top-D tOD | DC data predict time of week Time of DC data |
| CDC | $\delta\mathrm{a}_{\mathrm f0}$ $\delta\mathrm{a}_{\mathrm f1}$ | SV clock bias correction SV clock drift correction |
| EDC | ∆α ∆β ∆γ ∆i ∆Ω ∆A | Alpha correction to ephemeris parameters Beta correction to ephemeris parameters Gamma correction to ephemeris parameters Angle of inclination correction Angle of right ascension correction Semi-major axis correction |
GPS와 타 GNSS는 각기 다른 기준 시각 체계를 사용하고 있기 때문에, 다중위성군 기반 항법 해 계산 시 위성군 간의 시각 오프셋 보정이 필요하다. GGTO 파라미터는 이러한 GNSS 위성군 간의 시각 오프셋 보정에 활용된다.
타 GNSS 위성군 시각의 대표적인 예시로, Galileo System Time (GST)은 Galileo Time Service Provider에 의해 생성되며, 국제원자시 (International Atomic Time, TAI)와 50 ns 이하의 시각 오프셋을 유지한다 (Joo et al. 2012). GST의 시작 시점 (epoch)은 UTC 기준 1999년 8월 22일 일요일 0시의 13초 전으로 정의되어 있다 (Galileo ICD 2016).
GPS Time (GPST)과 GST의 차이는 Eq. (1)과 같이 표현된다 (IS-GPS-200N 2022).
$$\mathrm{t_{GST}=t_E−(A_{0GGTO}+A_{1GGTO}(t_E−t_{GGTO}+604800(WN−WN_{GGTO}))+A_{1GGTO}(t_{E}−t_{GGTO}+604800(WN−WN_{GGTO})^2)),}$$
여기서 $t_{GST}$는 GST를 의미하며, 단위는 초이다. $t_{E}$는 위성 시계 오차와 군 지연 및 전리층에 의한 오차가 보정된 GPS time을 의미하며, 단위는 초이다. WN는 현재 시점의 Week Number를 의미한다. 나머지 항에 대한 정의는 Table 4에 나타나 있다.
Table 4. GGTO parameters. All definitions are from GPS IS documents (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
| Usage | Parameter | Definition |
| GNSS ID | GNSS type ID | |
| Time offset correction | A0GGTO A1GGTO A2GGTO | Bias coefficient of GPS time scale relative to GNSS time scale Drift coefficient of GPS time scale relative to GNSS time scale Drift rate coefficient of GPS time scale relative to GNSS time scale |
| Reference time calculation | tGGTO WNGGTO | Time data reference time of week Time data reference week number |
또한, GLONASS Time (GLONASST)은 GLONASS Central Synchronizer에 의해 관리되며, $\mathrm{GLONASST}=\mathrm{UTC}+3(\mathrm{hour})-\tau(|\tau|<1\mathrm{ms})$으로 정의된다 (GLONASS ICD 1998). 이 때, $\tau$는 시각 오차로, 1 ms 미만으로 유지되어야 한다 (즉, $|\tau|<1\mathrm{ms}$을 만족하여야 함). GLONASST의 경우, UTC와 같이 윤초를 고려한다 (GLONASS ICD 1998).
GGTO 파라미터는 L1C (CNAV-2)의 서브프레임 3, 페이지 2와 CNAV (L2-CNAV, L5-CNAV)의 메시지 타입 35에 포함된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022). GPS IS 문서 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022) 상의 각 세부 파라미터의 정의는 Table 4와 같다.
Integrity Support Message (ISM)는 사용자가 Advanced Receiver Autonomous Integrity Monitoring (ARAIM)을 수행할 때 필요한 파라미터를 제공한다. ARAIM은 수신기 단독으로 위성항법시스템의 무결성을 감시하는 방법으로, 기존 단일 주파수 및 단일 위성군으로 활용 범위가 제한되었던 Receiver Autonomous Integrity Monitoring (RAIM)을 다중 주파수 및 다중 위성군에 활용할 수 있도록 발전시킨 것이다 (Blanch et al. 2012). 무결성이란 항법시스템이 제공하는 정보에 대한 신뢰도를 측정하는 척도로, 항법시스템에 이상이 생겼을 때 사용자에게 적시에 경보를 내려줄 수 있는 능력을 의미한다 (FRP 2021).
ARAIM 알고리즘 및 아키텍쳐는 EU-US ARAIM Technical Subgroup (ARAIM SG)에서 개발하고 있다 (Blanch et al. 2012). ARAIM SG에서 개발한 ARAIM 아키텍쳐는 지상국에서 주기적으로 각 항법 신호의 nominal 오차와 고장 (fault) 확률을 모니터링하여 위성에 업로드함을 가정한다 (Blanch et al. 2012). 또한, 이러한 무결성 데이터는 ISM에 포함되어 사용자에게 방송된다.
ISM은 총 11개의 세부 파라미터로 구성되어 있으며, L1C (CNAV-2)의 서브프레임 3, 페이지 8과 CNAV (L2-CNAV, L5-CNAV)의 메시지 타입 40에 포함된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
GPS IS 문서 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022) 상의 각 세부 파라미터의 정의는 Table 5와 같다. bnom의 경우, 가장 최근 발간된 GPS IS 문서(IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022)에서는 nominal 의사거리 오차 바이어스의 additive term으로 정의되고 있다. 그러나, 2022년 10월 개최된 Public Interface Control Working Group (ICWG) & Public Forum의 발표자료 (The Space Force 2022)에 따르면, 추후 발간될 IS 문서에서는 bnom의 정의가 Integrity Assured URA (IAURA)에 독립적인 (IAURA-independent) additive term으로 변경될 것으로 보인다. 또한, 해당 파라미터의 기호는 $\beta$nom으로 변경될 것으로 보인다.
Table 5. ISM parameters. All definitions are from GPS IS documents (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022).
| Usage | Parameter | Definition |
| GNSS ID | ||
| Reference time calculation | WNISM TOWISM | ISM week number ISM time of week |
| ARAIM | tcorrel bnom $\gamma$nom Rsat Pconst MFD Service level Mask | Correlation time constant Additive term for nominal pseudorange error bias Scalar term for nominal pseudorange error bias Satellite fault rate Constellation fault probability Mean fault duration Service level Satellite mask |
텍스트 메시지는 사용자에게 시스템에 대한 정보를 텍스트로 제공하기 위해 사용된다. L1C의 텍스트 메시지는 최대 29개의 8 비트 ASCII 문자를 포함할 수 있다 (IS-GPS-800J 2022). CNAV 메시지 타입 15의 텍스트 메시지는 최대 29개의 8 비트 ASCII 문자를 포함할 수 있으며, CNAV 메시지 타입 36의 텍스트 메시지는 최대 18개의 8 비트 ASCII 문자를 포함할 수 있다 (IS-GPS-200N 2022, IS-GPS-705J 2022).
텍스트 메시지의 구체적인 내용은 operating command에 의해 결정된다 (IS-GPS-800J 2022, IS-GPS-200N 2022, IS-GPS-705J 2022). 텍스트 메시지의 사용 예시로써, GPS에서는 2013년 6월 2주간 진행된 CNAV (L2-CNAV, L5-CNAV) test campaign 당시 CNAV 메시지 타입 15에 “THIS IS A GPS TEST MESSAGE”라는 더미 데이터(dummy data)를 실어 보낸 바 있다 (Montenbruck et al. 2013).
GPS 현대화 프로그램에 따라 기존 LNAV 메시지를 발전시킨 CNAV와 CNAV-2 메시지가 개발되었다. 본 논문에서는 큰 틀에서 LNAV와 비교하여 CNAV/CNAV-2에는 어떤 파라미터가 추가되었는지 조사 분석하였다. CNAV/CNAV-2는 LNAV와는 달리 파라미터를 가변적으로 포함할 수 있는 유연한 구조를 가지며, 이를 통해 사용자에게 추가적인 파라미터를 제공할 수 있다. LNAV에는 존재하지 않지만 CNAV/CNAV-2에 추가된 파라미터에는 군 지연 보정 파라미터 중 ISC 파라미터, 축소된 알마낙 파라미터, Earth Orientation 파라미터, 차등보정 파라미터, GGTO 파라미터, ISM, 텍스트 메시지가 있으며, 본 논문에서는 각 파라미터의 역할과 세부 파라미터 구성에 대해 분석하였다. CNAV 및 CNAV-2 사용자는 사용하고자 하는 항법 신호의 종류 및 주파수, 항법메시지의 업로드 시점, 다중 위성항법시스템 사용 여부, 활용 분야 등을 고려하여 각 항법메시지 파라미터를 적절하게 활용할 수 있다.
Blanch, J., Walter, T., Enge, P., Lee, Y., Pervan, B., et al. 2012, Advanced RAIM user algorithm description: Integrity support message processing, fault detection, exclusion, and protection level calculation, In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, Tennessee, 17-21 September 2012, pp.2828-2849. https://www.ion.org/publications/abstract.cfm?articleID=10462
Creel, T., Dorsey, A. J., Mendicki, P. J., Little, J., Mach, R. G., et al. 2006, Accuracy and monitoring improvements from the GPS legacy accuracy improvement initiative, In Proceedings of the 2006 National Technical Meeting of The Institute of Navigation, Monterey, California, 18-20 January 2006, pp.664-684. https://www.ion.org/publications/abstract.cfm?articleID=6572
FRP 2021, 2021 Federal Radionavigation Plan, DOT-VNTSCOST-R-15-01, Published by the Department of Defense, Department of Transportation, and Department of Homeland Security. https://rosap.ntl.bts.gov/view/dot/63024
Galileo ICD 2016, GALILEO Open Service-Signal in Space Interface Control Document (OS SIS ICD), Issue 1.3, European Space Agency/European GNSS Supervisory Authority. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-OS-SIS-ICD.pdf
GLONASS ICD 1998, GLONASS interface control document, version 4.0, MOSCOW. https://www.unavco.org/help/glossary/docs/ICD_GLONASS_4.0_(1998)_en.pdf
GPS Official Website 2023, Civil Navigation (CNAV) Message [Internet], National Coordination Office for Space-Based Positioning, Navigation, and Timing, cited 2023 Dec 14, available from: https://www.gps.gov/systems/gps/modernization/cnav/
GPS SPS 2020, Global Positioning System Standard Positioning Service Performance Standard, 5th edition, Department of Defense, USA. https://www.gps.gov/technical/ps/2020-SPS-performance-standard.pdf
IS-GPS-200N 2022, Global Positioning System Directorate Systems Engineering & Integration Interface Specification, IS-GPS-200N, Navstar GPS Space Segment / Navigation User Segment Interfaces, USA: Navstar GPS Joint Program Office. https://www.gps.gov/technical/icwg/IS-GPS-200N.pdf
IS-GPS-705J 2022, Global Positioning System Directorate Systems Engineering & Integration Interface Specification, IS-GPS-705J, Navstar GPS Space Segment / User Segment L5 Interfaces, USA: Navstar GPS Joint Program Office. https://www.gps.gov/technical/icwg/IS-GPS-705J.pdf
IS-GPS-800J 2022, Global Positioning System Directorate Systems Engineering & Integration Interface Specification, IS-GPS-800J, Navstar GPS Space Segment / User segment L1C interfaces, USA: Navstar GPS Joint Program Office. https://www.gps.gov/technical/icwg/IS-GPS-800J.pdf
Joo, J.-M., Cho, J.-H., & Heo, M.-B. 2012, Analysis of GPS Galileo Time Offset Effects on Positioning, J-KICS, 37, 1310-1317. https://doi.org/10.7840/kics.2012.37c.12.1310
Kim, G.-H., Kim, C.-W., Kee, C.-D., & Choi, S.-J. 2013, LEO Satellite Position and Velocity Coordinate Transformation Using GPS CNAV, Journal of Advanced Navigation Technology, 17, 271-278. https://doi.org/10.12673/jkoni.2013.17.3.271
Martini, I., Sgammini, M., & Boyero, J. P. 2020, Galileo model of group delay accuracy for advanced RAIM users, Navigation, 67, 129-141. https://doi.org/10.1002/navi.356
Misra, P. & Enge, P. 2006, Global Positioning System: Signals, Measurements, and Performance, 2nd ed. (Lincoln: Ganga-Jamuna Press)
Montenbruck, O., Langley, R., & Steigenberger, P. 2013, 2C or Not 2C: The First Live Broadcast of GPS CNAV Messages, GPS World. https://www.gpsworld.com/2cor-not-2c-the-first-live-broadcast-of-gps-cnavmessages/
Steigenberger, P., Montenbruck, O., Bradke, M., Ramatschi, M., & Hessels, U. 2022, Evaluation of earth rotation parameters from modernized GNSS navigation messages, GPS Solutions, 26, 50. https://doi.org/10.1007/s10291-022-01232-4
Steigenberger, P., Montenbruck, O., & Hessels, U. 2015, Performance evaluation of the early CNAV navigation message, Navigation, 62, 219-228. https://doi.org/10.1002/navi.111
The Space Force 2022, Presentation: Global Positioning Systems (GPS) Public Interface Control Working Group (ICWG) & Public Forum, available from: https://www.gps.gov/technical/icwg/meetings/2022/
Wilson, B., Yinger, C., Feess, W., & Shank, C. 1999, New and improved-the broadcast interfrequency biases, GPS World, 10, 56-66.
Zhu, X., Li, Y., Yong, S., & Zhuang, Z. 2008, A novel definition and measurement method of group delay and its application, IEEE Transactions on Instrumentation and Measurement, 58, 229-233. https://doi.org/10.1109/TIM.2008.927197
본 연구는 과학기술정보통신부의 재원으로 한국연구재단, 무인이동체원천기술개발사업단의 지원을 받아 수행되었음 (2020M3C1C1A01086407). 또한, 본 논문은 2023년 과학기술정보통신부의 재원으로 한국연구재단 미래우주교육센터(2022M1A3C2074404, 미래우주항법 및 위성기술 연구센터)의 지원을 받아 수행된 연구임.
Conceptualization, H. Lee, S. Kim, J. Park, S. Jeong, S. Park, J. Yu, and J. Seo; investigation, H. Lee, S. Kim, J. Park, S. Jeong, S. Park, and J. Yu; resources, H. Lee, S. Kim, J. Park, S. Jeong, S. Park, and J. Yu; writing—original draft preparation, H. Lee, S. Kim, J. Park, S. Jeong, S. Park, and J. Yu; writing—review and editing, H. Lee, S. Kim, J. Park, S. Jeong, S. Park, J. Yu, H. Choi, and J. Seo; visualization, H. Lee; supervision, H. Choi and J. Seo; project administration, H. Choi and J. Seo; funding acquisition, J. Seo.
The authors declare no conflict of interest.