Tae Hyeong Jeon1![]() , Jaeyoung Song2
, Jaeyoung Song2![]() , Cheolmin Lee1
, Cheolmin Lee1![]() , Seonghyeon Yun1
, Seonghyeon Yun1![]() , Sang Hyun Park1
, Sang Hyun Park1![]() , Sul Gee Park1,†
, Sul Gee Park1,†![]()
1Maritime PNT Research Office, Daejeon 34103, Korea
2Maritime Safety and Environmental Research Division, Korea Research Institute of Ships & Ocean Engineering (KRISO), Daejeon 34103, Korea
†Corresponding Author: Sul Gee Park, E-mail: sgpark@kriso.re.kr
Citation: Jeon, T.H., Song, J., Lee, C., Yun, S., Park, S.H., & Park, S.G. 2025, Performance Analysis of Maritime Centimeter-level Augmentation System in Korea, Journal of Positioning, Navigation, and Timing, 14, 73-79.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 March, Volume 14, Issue 1, pages 73-79. https://doi.org/10.11003/JPNT.2025.14.1.73
Received on Dec 06, 2024, Revised on Dec 13, 2024, Accepted on Dec 26, 2024, Published on Mar 15, 2025.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
In this study, we analyze the performance of the Precise POsitioning and INTegrity monitoring (POINT) system, a Precise Point Positioning (PPP)-Real-Time Kinematic (RTK) based maritime precise Positioning, Navigation and Timing (PNT) system currently under development in Korea. The POINT system is a centimeter-level Global Positioning System (GPS) augmentation system that generates correction and integrity information based on GPS measurements received from the Continuously Operating Reference Station (CORS) of the National Maritime PNT OFFICE (NMPNT). To analyze the performance of the system, we performed static and dynamic experiments and compared the performance results with those of two existing precise positioning methods, Real-Time Kinematic (RTK) and Precise Point Positioning (PPP). From the results of the static experiment, the horizontal and vertical Root Mean Square (RMS) of POINT was 3.28 cm and 7.19 cm, respectively. From the results of the dynamic experiment in a maritime environment, the horizontal and vertical RMSs of POINT are 3.63 cm and 8.14 cm compared to RTK and 7.75 cm and 12.55 cm compared to PPP, respectively.
maritime PNT, POINT, augmentation system, PPP-RTK
최근 자율 시스템과 같이 항법이 필요한 다양한 분야에서 고정밀 측위 정보를 제공받기 위해 위성항법시스템(Global Navigation Satellite System, GNSS)을 대표적으로 활용하고 있다. 특히, 해양 환경에서 가시성 확보가 원활하여 GNSS를 활용한 고정밀 측위 정보의 활용도가 높아 다양한 연구가 진행되고 있다. 또한, 국제해사기구(International Maritime Organization, IMO)에서는 자율운항선박, 자동 접안, 스마트 항만 등과 같은 분야에서의 측위 정확도 및 무결성에 대한 최소 요구사항을 정의하였다 (IMO 2001). 국내에서는 IMO 요구사항을 만족시키는 고정밀 Positioning, Navigation and Timing (PNT) 보강정보 기술, Precise POsitioning and INTegrity monitoring (POINT)을 연구개발 하였다 (Park et al. 2024).
POINT 시스템은 국내 해안선으로부터 100 km 이내의 사용자에게 보강정보를 방송하여 센티미터급 측위 성능을 목표로 한다. 여기서, 보강정보는 Global Positioning System (GPS)의 오차 성분에 대한 보정정보와 보정정보의 신뢰성을 판단할 수 있는 무결성 정보를 합친 것을 의미한다. POINT 시스템은 중앙처리국, 기준국 그리고 감시국으로 구성된다. 중앙처리국은 기준국과 감시국에서 수집된 GPS 이중 주파수 측정치를 기반으로 보강정보를 생성 및 메시지화하여 방송하는 역할을 한다. 방송되는 보강정보는 Radio Technical Commision for Maritime Services (RTCM) 메시지 포맷을 따르며, Network Transport of RTCM via Internet Protocol (NTRIP)을 통해 방송된다 (RTCM SC-104 2022). 이때, 보강정보를 해양에서도 수신할 수 있도록 LTE뿐만 아니라 지상망인 UHD와 DMB망으로도 방송한다. 이때, 방송되는 보강정보는 동적 좌표계를 기준으로 하기 때문에 우리나라에서 사용하는 위치 기준인 측지 좌표계와의 변환 파라미터도 생성 및 메시지화하여 방송한다.
POINT 시스템의 기준국과 감시국은 국립해양측위정보원(National Maritime PNT Office, NMPNT)의 Nationwide Differential GNSS (NDGNSS) 기준국/감시국과 신규 기준국으로 구성된다. 여기서, 신규 기준국은 POINT 기준국이라 명명한다. 기준국에서 수집된 GPS 측정치는 보정정보를 생성하기 위해 사용되며, 보정정보는 Precise Point Positioning-Real Time Kinematic (PPP-RTK) 기법을 기반으로 위성궤도, 위성시계, 위성 반송파 바이어스, 전리층 및 대류권 지연 오차에 대한 보정값을 오차 요소 별로 생성된다 (Kim et al. 2022). 감시국에서 수집된 GPS 측정치는 생성된 보정정보에 대한 무결성 정보 생성을 위해 사용된다. 감시국은 무결성 파라미터를 생성하기 위한 평가 감시국과 이를 기반으로 무결성 flag를 생성하기 위한 감시국으로 구분된다 (Song et al. 2023).
본 논문에서는 POINT 시스템에서 생성된 보정정보 기반 측위 성능을 분석하기 위하여 감시국에서의 장기간 실험검증과 해상에서의 선박 실험을 수행하였다. 2장에서는 POINT 시스템에 대하여 설명하고, 3장에서는 성능 실험 및 검증 결과를 제시하였다. 마지막으로 4장에서는 실험 결과에 대하여 결과를 고찰하고 향후 연구내용에 대하여 설명하였다.
POINT 중앙처리국은 NDGNSS 기준국/감시국과 신규 POINT 기준국의 데이터를 수집하고, 보정정보와 무결성 정보, 즉 보강정보를 생성한다. 보정정보는 GPS 이중 주파수 측정치를 기반으로 생성하며, 생성되는 보정정보 요소는 위성궤도, 위성시계, 위성 반송파 바이어스, 대기오차 성분인 전리층 및 대류권 지연 오차를 포함한다. 여기서, 전리층 및 대류권 지연 오차에 대한 보정정보는 각 기준국의 위치를 기준으로 계산되며, 이를 1~32번으로 할당된 격자점에 대한 값으로 보간한다 (Fig. 1 참조). 보강정보는 사용자를 위해 RTCM 표준 제정에 맞추어 메시지화하고, LTE 통신 및 UHD, DMB 방송망을 이용하여 방송한다. 그리고, 중앙처리국은 시스템의 가용성과 연속성을 높일 수 있도록 이중화 하였다.
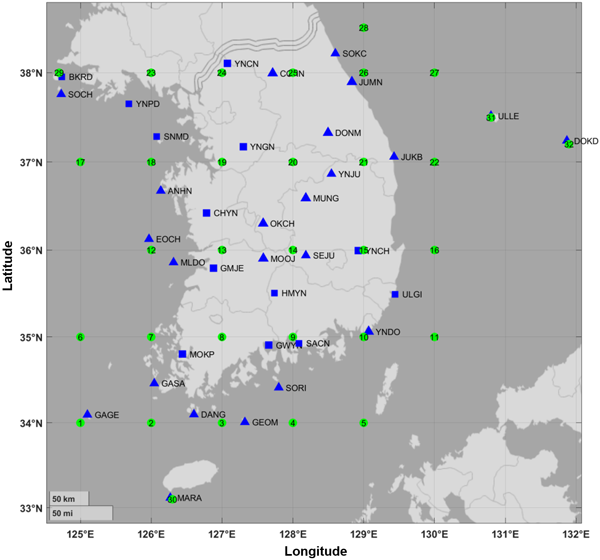
기준국은 네트워크 분포와 기준국의 GPS 신호 수집률을 고려하여 Fig. 1과 같이 선별하였다. 여기서, POINT 기준국은 POINT 시스템의 목표 성능을 만족시키기 위해 신규 구축되었다. 이때, POINT 기준국의 위치는 기존 NDGNSS 기준국/감시국 기반 기준국 배치 시뮬레이션에 따른 측위 성능 예측 결과를 통해 결정되었다.
감시국의 역할은 생성된 보정정보의 신호 품질과 무결성을 판단하기 위한 파라미터 생성과 이를 기반으로 무결성 정보를 생성하기 위한 데이터를 제공하는 것이다. 전자는 평가 감시국에서 수집된 데이터를 기반으로 수행되며, 후자는 평가 감시국을 제외한 감시국에서 수집된 측정치를 기반으로 수행된다. 무결성 파라미터는 평가 감시국의 정밀 좌표와 GPS 측정치를 바탕으로 전리층 지연오차, 대류권 지연오차, 위성 관련 오차의 신호 품질 정보이다. 무결성 정보는 무결성 파라미터와 감시국의 측정치를 기반으로 생성되며, 감시국에서의 측위 결과와 무결성 파라미터를 통해 계산된 Protection Level (PL) 값을 비교하여 생성된 무결성 flag를 의미한다.
사용자는 수신한 위성궤도, 위성시계, 위성 반송파 바이어스, 전리층 및 대류권 지연오차에 대한 보정정보를 사용자가 수신한 GPS 이중 주파수 측정치에 적용하여 측위한다. 이 때, 사용자는 보정정보에 포함된 위성만을 이용하여 측위하며, 전리층과 대류권 지연오차에 대한 보정정보는 자신의 위치 주변의 격자점에 대한 보정값들을 양선형 보간법(Bilinear interpolation)을 사용하여 보간한다. 측위에 사용되는 모델은 전리층 가중치 적용 미차분, 미조합 (Ionosphere-Weighted Un-Differenced, Un-Combined, IW UDUC) PPP-RTK 사용자 모델로 식 (1-3)과 같다 (Zha et al. 2021).
$$\mathbb{E} \left[ \Delta \rho_{u,j}^s + \tilde{dt}^s + \tilde{d}_{,j}^s – m_{u}^s \tilde{\tau}_{u, \text{intp}} \right] = e_{u}^s \Delta x_{u} + \tilde{\tau}_{u} + \mu_{j} \hat{l}_{u}^s + \tilde{d}_{u,j} + \mu_{j} \tilde{d}_{u, \text{GF}}$$
$$\mathbb{E} \left[ \Delta \phi_{u,j}^s + \tilde{dt}^s + \tilde{\delta}_{,j}^s – m_{u}^s \tilde{\tau}_{u, \text{intp}} \right] = e_{u}^s \Delta x_{u} + \tilde{\tau}_{u} – \mu_{j} \hat{l}_{u}^s + \tilde{\delta}_{u,j} + \lambda_{j} \tilde{z}_{u,j}^s$$
$$\mathbb{E} \left[ \hat{l}_{u}^s \right] = \tilde{l}_{u, \text{intp}}^s$$
여기서 $\Delta \rho_{u,j}^s$, $\Delta \phi_{u,j}^s$는 각각 기하거리와 방송 궤도력 등이 차분된 사용자의 코드, 반송파 측정값이다. 각 변수의 윗첨자 s는 위성 인덱스, 아랫첨자 u, j는 각각 사용자 수신기와 주파수 인덱스를 나타내며, $\tilde{\left( \cdot \right)}$와 $\tilde{\left( \cdot \right)}$는 각각 estimable parameter와 biased parameter를 나타낸다. $\tilde{dt}^s$, $\tilde{d}_{,j}^s$와 $\tilde{\delta}_{,j}^s$는 POINT 시스템으로부터 제공된 위성 시계, 코드, 위상 바이어스이며, 사용자는 이들을 수신하여 UDUC 측정값에 직접 반영한다. 여기서 코드 바이어스 $\tilde{d}_{,j}^s$는 삼중 주파수 이상의 시스템에서만 예측이 가능하기 때문에 현재 이중 주파수만을 사용하는 POINT 시스템에서는 제공되지 않는다. $\tilde{\tau}_{u, \text{intp}}$와 $m_{u}^s$는 사용자의 위치에 대해 보간된 천정 방향 습윤 지연과, 이의 사상함수(Global Mapping Function, GMF)이다. $e_{u}^s$와 $\Delta x_{u}$는 각각 사용자 위치에서 위성에 대한 가시선(line of sight) 벡터와 사용자의 위치 증분 벡터이다. $\mu_{j}$는 주파수 의존 상수값으로 $\frac{f_{1}^2}{f_{j}^2}$이며, $l_{u}^s$는 L1 주파수에 대한 경사 전리층 지연값이다. $\tilde{l}_{u, \text{intp}}^s$는 보간된 경사 전리층 지연값이며, $\tilde{dt}_{u}$, $\tilde{d}_{u,j}$, $\tilde{d}_{u,GF}$는 각각 사용자 수신기 시각 지연, 코드 바이어스, Geometry-free 코드 바이어스로, $\tilde{d}_{u,j}$는 POINT 사용자 역시 이중 주파수를 사용하기 때문에 예측이 불가능하다. $\tilde{\delta}_{u,j}$는 사용자 수신기의 위상 지연이며, $\lambda_{j}$는 해당 주파수에 대한 파장값이다. $\tilde{Z}_{u,j}^{s}$는 사용자 수신기의 미지정수이며, 사용자는 반송파 측정치의 미지정수를 도출하기 위해 Least-squares AMBiguity Decorrelation Adjustment (LAMBDA) 기법을 사용한다.
현재 POINT 정보를 사용하기 위해서는 Fig. 2와 같이 POINTer 수신플랫폼을 사용해야 한다. 수신플랫폼은 센티미터급 측위 성능을 내기 위해서 NovAtel사 OEM7720 모듈이 장착되어 있으며, LTE, UHD, 그리고 DMB 망을 통해 모두 보정정보를 수신할 수 있도록 설계되었다.

정적 실험은 선박해양플랜트연구소 내 건물 옥상에 Fig. 3과 같이 설치된 NovAtel사 GNSS-750 안테나와 수신플랫폼을 연결하여 실시간 측위를 수행하였으며, POINT 보강정보를 수신하기 위하여 LTE 통신망을 활용하였다. 실험은 2024년 9월 12일부터 2024년 10월 17일(DOY 256~291)까지 수행되었으며, 그 중 시스템 업데이트 및 네트워크 이슈 등을 제외한 총 27일간의 측위 성능을 분석하였다. 측위 성능 분석을 위한 참조값은 호주의 지질자원연구원에서 제공하는 온라인 PPP 서비스인 AUSPOS를 이용하여 구하였다 (AUSPOS 2024).
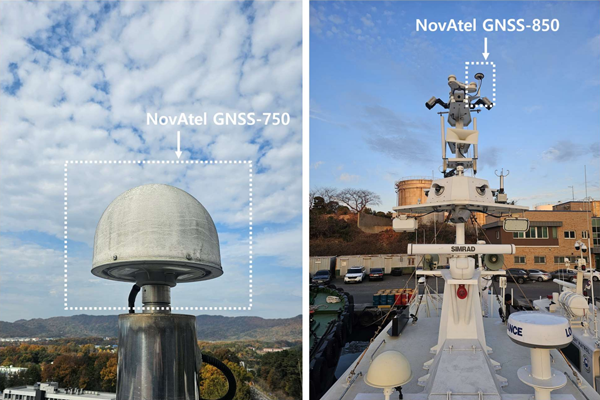
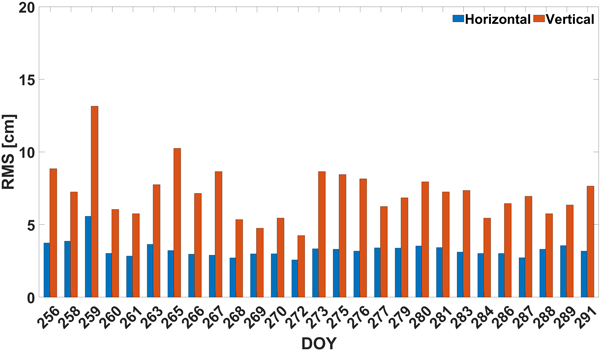
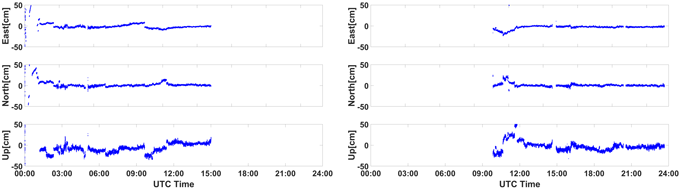
Fig. 4는 POINT 측위 결과에 대한 Root Mean Square (RMS) 값을 DOY별로 나타낸 그래프이며, Table 1은 Fig. 4에 나타낸 RMS 값을 표로 정리한 것이다. 총 27일 동안의 RMS 평균값은 수평 3.28 cm, 수직 7.19 cm로 높은 정확도를 보였으며, 대부분의 일자에서 RMS 값은 평균값 대비 수평 ±1 cm, 수직 ±2 cm 이내로 안정적인 성능을 보였다. 하지만, DOY 259의 경우 수평, 수직 RMS 값이 각각 5.57 cm, 13.15 cm로 평균 대비 2.29 cm, 5.96 cm 증가하였으며, DOY 265의 경우 수직 RMS 값이 10.25 cm로 평균 대비 3.06 cm 증가하였다. 여기서, Fig. 5는 DOY 259일과 265일 측위 오차 그래프를 나타내며, 오차가 계산되지 않은 구간은 POINT 기준국/중앙처리국에서 통신 네트워크, 데이터 수집, 전원 등의 문제로 비정상 작동을 하여 보강정보가 방송되지 않은 구간을 의미한다. 해당 일자에서 6시간 이상 보정정보가 방송되지 않았고, 보정정보 방송 시의 데이터의 불안정문제로 RMS 값이 다소 증가한 것으로 보인다.
| DOY | 256 | 258 | 259 | 260 | 261 | 263 | 265 | 266 | 267 | 268 | 269 | 270 | 272 | 273 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMS (cm) | Hor. | 3.74 | 3.86 | 5.57 | 3.02 | 2.84 | 3.64 | 3.22 | 2.97 | 2.90 | 2.71 | 2.99 | 2.99 | 2.57 | 3.34 |
| Vert. | 8.85 | 7.25 | 13.15 | 6.05 | 5.75 | 7.75 | 10.25 | 7.15 | 8.65 | 5.35 | 4.75 | 5.45 | 4.25 | 8.65 | |
| DOY | 275 | 276 | 277 | 279 | 280 | 281 | 283 | 284 | 286 | 287 | 288 | 289 | 291 | Mean | |
| RMS (cm) | Hor. | 3.31 | 3.18 | 3.40 | 3.38 | 3.53 | 3.42 | 3.11 | 3.02 | 3.02 | 2.72 | 3.31 | 3.56 | 3.18 | 3.28 |
| Vert. | 8.45 | 8.15 | 6.25 | 6.85 | 7.95 | 7.25 | 7.35 | 5.45 | 6.45 | 6.95 | 5.75 | 6.35 | 7.65 | 7.19 | |
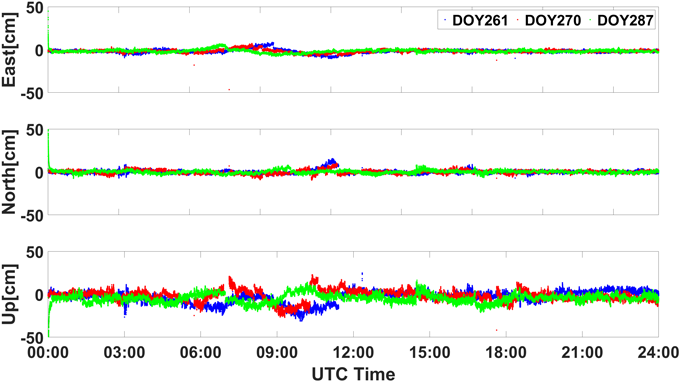
Fig. 6은 DOY 261, 270 그리고 287일에 대한 측위 오차를 나타낸 그래프이다. 각 일자에 대한 RMS 값은 DOY 261일의 경우 수평 2.84 cm, 수직 5.75 cm, DOY 270일의 경우 수평 2.99 cm, 수직 5.45 cm 그리고 DOY 287일의 경우 수평 2.72 cm, 수직 6.95 cm로 높은 정확도를 보였다. 하지만, Fig. 6에서 확인할 수 있듯이 3일 모두 공통적으로 UTC 기준 6~12시 사이에 오차가 증가하는 모습을 보이며, 이외에 시간에는 안정적인 측위 성능을 보였다. 낮시간대에 전리층 활동 증가로 인한 영향으로 예상되나, 정확한 원인 파악을 위해 추가적인 분석이 필요할 것으로 판단된다.
해상 실험을 위해 산업통상자원부에서 연구개발 중인 자율운항시험선 해양누리호에 Fig. 3과 같이 NovAtel GNSS-850 안테나를 설치하였다. 수신기는 참조값을 얻기 위한 NovAtel PwrPak7 수신기와 POINT 보강정보 기반 측위를 하기 위한 수신플랫폼을 선박 내부에 설치하였다. 실험 일자는 2024년 4월 24일이며, UTC 기준으로 05:30~08:30 약 3시간 동안 진행되었다. 실험 경로는 울산 장생포항에서 출발하여 해안선으로부터 약 20 km 떨어진 해상까지 왕복으로 운항하였다.
POINT 보강정보는 Fig. 1의 CORS에서 수집된 RTCM 데이터를 기반으로 생성되었으며, 이를 수신플랫폼을 통해 저장된 GPS 측정치에 적용하여 측위를 진행하였다. 이때, 보정정보 요소 중 전리층과 대류권 지연 오차에 대한 보정정보는 Fig. 1의 격자점 10, 11, 15, 16번에 대한 값들을 보간하여 사용하였다. 비교군으로는 다중 위성군 기반의 서비스인 국토지리정보원(National Geographic Information Institute, NGII)의 Virtual Reference Station (VRS) 서비스와 후처리 PPP 서비스인 Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP 2022)을 사용하였다. 이때, VRS는 실시간으로 NTRIP 클라이언트를 통해 보정정보를 수신 및 적용하여 나온 결과이며, PPP는 NovAtel PwrPak7 수신기에서 로깅된 GNSS 측정치를 기반으로 CSRS-PPP 서비스를 통해 나온 결과이다 (Fig. 7 참조). 해상 동적 환경에서는 VRS의 정확도가 열화되며, PPP의 경우 해상에서는 가능하지만 측위 오차 범위가 POINT 목표성능보다 높기 때문에, 두 가지 참조값을 활용하여 정확도와 정밀도를 확인하였다.
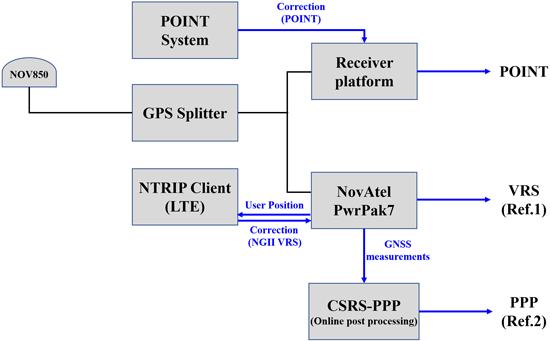
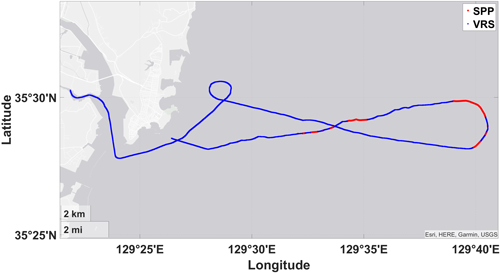
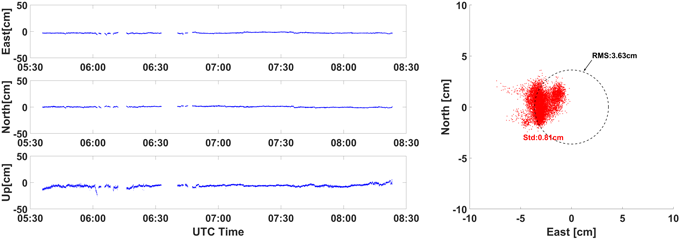
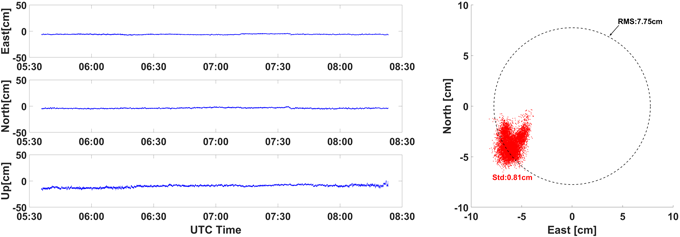
Fig. 8은 실험 경로를 나타내며, VRS 서비스에 대한 정보 수신 상태에 따라 측위 솔루션이 Single Point Positioning (SPP)로 변경되는 것을 확인할 수 있다. Figs. 9와 10은 각각 POINT 측위 결과에 대하여 VRS와 PPP의 측위 결과를 참조값으로 사용할 경우에 대한 East-North-Up (ENU) 및 수평 오차 그래프이다. Table 2는 두 가지 솔루션을 참조값으로 사용하여 계산된 POINT 측위 결과에 대한 RMS와 표준편차값이다.
| Reference | RMS (cm) | Std. (cm) | ||
|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | |
| VRS | 3.63 | 8.14 | 0.81 | 2.58 |
| PPP | 7.75 | 12.55 | 0.81 | 2.54 |
VRS의 경우 Fig. 8에서 확인할 수 있듯이 해안에서 멀어짐에 따라 통신망을 이용한 보정정보 수신이 불가능한 구간이 발생하였으며, VRS 보정정보가 수신된 구간만을 참조값으로 사용하였다. VRS를 참조값으로 사용할 경우 POINT 측위 결과에 대한 오차는 수평 및 수직 RMS가 각각 3.63 cm, 8.14 cm로, 수평과 수직 오차가 모두 10 cm 이내였다. 또한, 표준편차는 수평 0.81 cm, 수직 2.54 cm로 높은 정밀도를 보였다.
PPP를 참조값으로 사용할 경우 POINT 측위 결과에 대한 오차는 수평 및 수직 RMS는 각각 7.75 cm, 12.55 cm로, VRS를 참조값으로 사용할 경우와 비교하여 수평과 수직 RMS 값이 약 4 cm가량 증가하였다. 하지만, 해상 동적 환경에서는 참조값을 얻기 어렵고, 각각의 솔루션이 가지는 오차가 포함되므로 편향된 결과를 보일 수 있다 (Fig. 10 참조). 이에 비해, 표준편차는 VRS 비교 시와 유사하게 수평 0.81 cm, 수직 2.58 cm로 높은 정밀도를 보였다.
본 논문에서는 정적 및 해상 실험을 통해 국내에서 개발 중인 POINT 시스템에 대한 측위 성능을 분석하였다. 정적 실험 결과에서는 27일 동안의 평균 RMS 값이 수평 3.28 cm, 7.19 cm로 목표성능을 만족하였다. 그리고 해상 실험에서는 POINT 시스템의 측위 성능 분석을 위해 고정밀 측위 서비스인 국토지리정보원의 VRS와 후처리 PPP 서비스인 CSRS-PPP와의 측위 결과를 비교하였으며, POINT 측위 결과에 대한 RMS 값은 VRS와 비교 시 수평 3.63 cm, 수직 8.14 cm, PPP와 비교 시 수평 7.75 cm, 수직 12.55 cm였다. 표준편차는 두 참조값 대비 모두 수평 1 cm, 수직 3 cm 이하로 높은 정밀도를 보였으며, POINT 시스템은 GPS 단일 위성군을 사용하였음에도 높은 정확도와 정밀도를 보였다.
현재까지 POINT 시스템은 GPS 단일 위성군을 사용함에 따라 육상 환경 사용자의 GPS 수신환경이 좋지 않을 경우 측위 성능이 저하될 수 있다는 한계점을 지니고 있다. 이에 따라 추후에는 다중 위성군 기반 PPP-RTK 구현 및 성능 분석에 대한 연구를 진행할 예정이다. 또한 POINT 시스템은 자율 시스템에 주로 사용되는 레이더, 라이다 등 추가적인 센서와의 결합을 통해 상황 인식 시스템의 신뢰성을 높이는데 활용할 수 있을 것으로 예상된다.
본 논문은 해양수산부 재원으로 국가연구개발사업인 “지상기반 센티미터급 해양 정밀 PNT 기술개발”에 의해 수행되었습니다 (2520000093).
Conceptualization, T. H. Jeon, and S. G. Park; methodology, T. H. Jeon, and S. G. Park; software, T. H. Jeon; validation, T. H. Jeon, J. Song, C. Lee, S. Yun, and S. G. Park; formal analysis, T. H. Jeon; writing—original draft preparation, T. H. Jeon; writing—review and editing, T. H. Jeon, S. G. Park, S. H. Park; project administration, S. H. Park.
The authors declare no conflict of interest.
AUSPOS 2024, AUSPOS – Online GPS Processing Service [Internet], available from: https://www.ga.gov.au/ scientific-topics/positioning-navigation/geodesy/auspos
CSRS-PPP 2022, Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP) service [Internet], available from: https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/ tools-outils/ppp.php
International Maritime Organization 2001, Revised Maritime Policy and Requirements for a Future Global Navigation Satellite System Resolution A.915(22), 2001.
Kim, G., Jeon, T. H., Song, J., Park, S. G., & Park, S. H. 2022, Architecture Design for Maritime Centimeter-Level GNSS Augmentation Service and Initial Experimental Results on Testbed Network, Journal of Positioning, Navigation, and Timing, 11, 269-277. https://doi.org/10.11003/ JPNT.2022.11.4.269
Park, S. G., Lee, C., Song, J., Jeon, T. H., Yun, S., et al. 2024, Performance Analysis for POINT Service Based on National Network, 2024 IPNT Conference, Jeju, Korea, Nov 6-8 2024, pp.9-12. https://ipnt.or.kr/2024proc/182
RTCM Special Committee No.104 2022, Differential GNSS (global navigation satellite systems) services – version 3 + amendment 3 (RTCM Standard No. 10403.3).
Song, J., Jeon, TH., Kim, G., Park, S. H., & Park, S. G. 2023, Trend and Analysis of Protection Level Calculation Methods for Centimeter-Level Augmentation System in Maritime, Journal of Positioning, Navigation, and Timing, 12, 281288. https://doi.org/10.11003/JPNT.2023.12.3.281
Zha, J., Zhang, B., Liu, T., & Hou, P. 2021, Ionosphere-weighted undifferenced and uncombined PPP-RTK: theoretical models and experimental results, GPS Solutions, 25, 135147. https://doi.org/10.1007/s10291-021-01169-0