Junsoo Kim1, Noah Minchan Kim1, Dongchan Min1, Donguk Kim2, Jiyun Lee1,†
1Department of Aerospace Engineering, Korea Advanced Institute of Science and Technology, Daejeon 34141, Korea
2Agency for Defense Development, Daejeon 34186, Korea
†Corresponding Author: Jiyun Lee, E-mail: jiyunlee@kaist.ac.kr
Citation: Kim, J., Kim, N.M., Min, D., Kim, D., & Lee, J. 2025, Analysis of User Range Accuracy in LNAV Message Format for WAD-RNSS, Journal of Positioning, Navigation, and Timing, 14, 53-62.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 March, Volume 14, Issue 1, pages 53-62. https://doi.org/10.11003/JPNT.2025.14.1.53
Received on Feb 10, 2025, Revised on Mar 04, 2025, Accepted on Mar 06, 2025, Published on Mar 15, 2025.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Satellite navigation provides positioning and timing services through Signal-In-Space (SIS) signals. The User Range Accuracy (URA) is a conservative standard deviation estimate of the SIS User Range Error (URE), which arises from errors in the navigation messages contained within the SIS signals. While the URA computation equation is well established for the GPS, it should be modified for other constellations due to differing orbital characteristics. This paper derives a URA computation equation for a Wide Area Differential Radio Navigation Satellite System covering the Korean peninsula. This system is assumed to use Inclined Geosynchronous Orbit and Geostationary Earth Orbit satellites. The derived equation accounts for the higher orbital altitudes of these satellites compared to GPS, where URA is assumed to be broadcast in the Legacy Navigation format. Simulation results confirm that the proposed URA formulation conservatively bounds SIS UREs within the service area under various user locations and prediction intervals. Additionally, URA variations for different reference station distributions are analyzed. The results show that a denser and more widely distributed reference station network leads to a smaller URA.
global navigation satellite system, user range accuracy, regional navigation satellite system
위성항법시스템은 Signal-In-Space (SIS) 항법 신호를 통해 지상 사용자에게 Positioning, Navigation, and Timing (PNT) 서비스를 제공하는 시스템이다. 전지구 서비스를 제공하는 Global Navigation Satellite System (GNSS)으로는 미국의 GPS를 비롯하여 유럽연합의 Galileo, 중국의 BeiDou, 그리고 러시아의 GLONASS가 있으며, Regional Navigation Satellite System (RNSS)으로는 일본의 QZSS와 인도의 IRNSS 등이 있다. 대한민국 또한 한반도 지역 서비스를 목표로 한국형 위성항법시스템(Korean Positioning System, KPS)을 개발 중에 있다 (Ahn et al. 2020, Joo & Heo 2020). Kim et al. (2021)은 KPS와 같은 RNSS 시스템의 정확도 향상을 위해 Wide Area Differential (WAD)-RNSS 시스템을 제안하였다. WAD-RNSS 시스템은 광역 보정항법 기술을 RNSS에 적용한 시스템으로, 기존의 지역 위성항법 서비스와 더불어 보정항법 서비스를 통합 제공하는 특징을 지닌다.
위성항법시스템의 SIS 항법 신호는 위성의 궤도력 및 시계 정보 등이 포함된 항법 메시지와 의사거리 측정을 위한 Pseudo Random Noise (PRN) 코드로 구성된다. SIS 항법 신호는 우주 공간에서 대기권을 통과하여 사용자에게 도달하는 과정에서 다양한 오차 요인의 영향을 받게 된다. 이러한 오차 요인 중 항법 메시지에 기인하는 오차를 SIS User Range Error (URE)라 정의한다 (U.S. DoD 2020). SIS URE는 특히 항법 메시지에 포함된 위성 궤도 및 시계 오차의 영향을 크게 받으며, 이러한 오차 성분을 사용자 시선 벡터(line-of-sight)에 투영하여 정량화된다 (U.S. DoD 2020). 이는 항법 메시지 생성 과정에 관여하는 위성체(space segment) 및 기준국(control segment)에 의한 모든 오차 요인을 포괄한다.
SIS URE는 통계적으로 0을 평균으로 하는 정규 분포를 따르는 것으로 가정되며, 보수적으로 추정된 SIS URE의 표준편차를 User Range Accuracy (URA)라 한다. URA는 위성 궤도력 및 시계 정보와 함께 항법 메시지를 통해 사용자에게 제공된다. 사용자는 URA를 통해 수신된 SIS 신호의 정확도를 유추할 수 있으며, 이를 항법해 계산 과정에서 가중치로 활용할 수 있다. 또한, GPS Standard Positioning System Performance Standard (SPS PS)에서는 URA를 기반으로 SIS 항법 신호의 무결성을 규정하고 있으며, 민간 항공기의 정밀 접근 및 착륙 지원을 위해 개발 중인 Advanced Receiver Autonomous Integrity Monitoring (ARAIM) 기술에서는 사용자 항법 무결성 정량화를 위한 파라미터 중 하나로 URA를 활용한다. 이와 같이 URA는 위성항법시스템의 다양한 영역에서 활용된다.
URA는 항법 메시지에 포함되어 사용자에게 전달되기 때문에, 항법 메시지 업데이트 주기와 동일한 간격으로 업데이트 된다. 따라서, URA는 항법 메시지가 업데이트 된 시점을 기준으로 다음 업데이트가 이루어지기 전까지, 전 지구상에 위치하는 모든 사용자에 대하여 SIS URE 오차의 표준 편차를 보수적으로 대표하는 값으로 결정되어야 한다. SIS URE 오차는 위성과 사용자의 시선 벡터에 영향을 받기 때문에, URA는 위성의 궤도를 고려하여 계산된다. U.S. DoD (2020)는 GPS의 경우에 대하여, URA 산출식을 공개하고 있지만, 이는 GPS 위성 궤도에 한정된 식이며, 다른 궤도를 사용하는 위성군의 경우 그에 알맞은 URA 산출식이 사용되어야 한다.
본 논문에서는 한반도 지역의 WAD-RNSS 시스템의 URA 산출식을 도출하고 다양한 상황에서의 URA를 비교 분석한다. 한반도 지역 WAD-RNSS는 Inclined Geosynchronous Orbit (IGSO) 위성과 Geosynchronous Earth Orbit (GEO) 위성을 활용한다고 가정하였다 (Kim et al. 2021). IGSO와 GEO 위성은 GPS 위성 궤도보다 더 높은 고도에서 공전하므로, 이를 반영하여 적합한 URA 산출식을 도출한다. 도출된 URA는 GPS 시스템 운용 초기부터 활용되어 온 Legacy Navigation (LNAV) 항법 메시지 포맷으로 방송되는 상황을 가정한다. 시뮬레이션을 통해 제안하는 LNAV 포맷의 URA가 서비스 영역 내 사용자 SIS URE 오차를 보수적으로 바운드하는지 검증한다. 또한, 궤도 및 시계 오차 추정에 활용되는 기준국의 분포에 따른 URA의 변화를 검토한다. 본 연구는 URA 생성에 영향을 미치는 주요 요소들을 체계적으로 식별하고 분석함으로써 WAD-RNSS의 운영 상황에 최적화된 URA 산출 체계를 구축하는 데 기여한다. 이러한 연구 결과는 향후 Civil Navigation (CNAV) URA와 같은 현대화된 URA 산출 방식 개발에 중요한 기초 자료로 활용될 수 있을 것이다.
이 논문의 구성은 다음과 같다. 2장에서는 URA의 정의와 LNAV 항법 메시지에서의 URA 포맷, 그리고 URA 활용 방안에 대해 간략히 기술한다. 3장에서는 한반도 지역 WAD-RNSS 시스템을 소개하고, URA 산출을 위한 데이터셋에 대해 기술한다. 4장에서는 생성된 데이터셋을 활용하여 한국형 RNSS의 LNAV URA를 산출하고 그 타당성을 검증한 결과를 제시한다. 5장에서는 기준국 구성에 따른 LNAV URA 시뮬레이션 결과를 분석한다. 마지막으로 6장에서는 연구의 결론과 향후 연구 방향을 제시한다.
이번 장은 GPS 시스템의 SPS PS (U.S. DoD 2020)와 Interface Control Document (ICD) (U.S. DoD 2022)에 기술되어 있는 URA에 대한 내용을 간략히 정리하였다. 2.1절에서는 URA의 정의에 대해 설명하고, 2.2절에서는 LNAV 항법 메시지로 전달되는 URA의 포맷, 그리고 2.3절에서는 URA의 활용에 대해 기술한다.
SIS URE 오차는 항법 메시지로부터 발생하는 오차를 의미하며, SIS URE 오차가 0평균 정규 분포를 따른다는 가정 하에 산출된 보수적인 표준편차를 URA라고 한다 (U.S. DoD 2020). GPS 시스템을 구성하는 위성체, 기준국, 사용자(user segment) 부문 중, URA는 항법 메시지 생성에 영향을 미치는 위성체와 기준국에 의한 오차 요소에 의해 결정된다 (U.S. DoD 2020). 이러한 URA는 서비스 제공자의 관점에서 시스템의 성능을 정량화하는 수단 중 하나로 활용된다. 반면, 대기 지연 오차와 같은 사용자에 종속적인 오차 요소는 시스템이 통제할 수 없기 때문에 URA에 포함되지 않는다 (U.S. DoD 2020).
SIS URE는 위성 궤도 및 위성 시계 오차를 위성과 사용자의 시선 벡터에 투영한 값으로 계산된다. URA는 SIS URE의 이러한 특징을 반영하여 두 가지의 요소를 고려해 계산되어야 한다.
1) 시간적 변화: URA는 위성 궤도 및 시계 정보를 포함하는 항법 메시지에 함께 포함되어 사용자에게 방송되며, GPS 시스템의 경우 약 2시간의 주기로 업데이트 된다 (U.S. DoD 2022). 즉, 업데이트 시점을 기준으로 시간이 지남에 따라 위성 궤도 및 시계 오차가 증가하여 SIS URE 오차도 증가한다. URA는 이러한 시간적 변화를 고려하여 SIS URE의 표준편차를 보수적으로 나타내어야 한다.
2) 공간적 변화: SIS URE는 사용자의 시선 벡터로부터 결정되기 때문에, 지구상 사용자 위치에 따라 그 값이 다르다. 따라서, URA는 이러한 공간적 차이를 고려하여 SIS URE의 표준편차를 보수적으로 나타내어야 한다.
다른 위성항법시스템의 URA를 살펴보면, Galileo의 경우 현재는 GPS URA와 동일한 개념이 아닌 Signal In Space Accuracy (SISA)를 사용하고 있다. SISA는 항법 데이터의 정확도에 대한 통계적 지표이지만, GPS URA와는 계산 방식과 적용 기준이 다르다. 최근 ESA를 중심으로 항법 데이터의 무결성 지표 표준화를 위해 GPS URA 정의와 일치하는 Galileo URA 산출 방식을 프로토타이핑하고 검증하는 연구가 진행 중이다 (Galluzzo et al. 2020). 반면, 일본의 Quasi-Zenith Satellite System (QZSS)는 GPS와의 호환성을 위해 GPS와 동일한 URA 정의 및 산출 방식을 채택하고 있다 (Cabinet Office 2024).
GPS L1 C/A 신호로부터 전달되는 LNAV 메시지는 GPS 운용 초기부터 활용되어 온 항법 메시지 포맷이다. LNAV 메시지에서 URA는 4비트 크기로 전송되며, 0 ~ 15의 단일 index로 표현된다. 각 index에 해당하는 URA값의 범위는 Table 1과 같다 (U.S. DoD 2022). Index의 크기가 작을수록 항법 메시지의 정확도가 높다는 것을 나타내며, 최대 index 15 상황은 항법 메시지를 믿을 수 없는 상황을 의미한다. GPS Block IIF 위성에 대해 2008년부터 2014년까지의 항법 메시지를 분석한 결과, 전체 관측 시간의 92% 이상에서 URA index가 0으로 방송되었으며, index 1이 약 7%, 나머지 index들은 전체의 1% 미만을 차지하는 것으로 나타났다 (Walter & Blanch 2015).
table
SIS URE 오차의 표준편차를 나타내는 URA는 위성항법시스템의 다양한 영역에서 활용된다. URA는 항법 신호의 무결성 확보, 항법해 정확도 향상, 그리고 보호수준 산출 등에 사용된다. SIS 항법 신호의 무결성은 “SIS URE 오차의 크기가 Not-To-Exceed (NTE) Tolerance를 초과하였음에도, Time To Alert (TTA) 시간 내에 사용자에게 경고가 도달하지 않은 확률”로 정량화된다 (U.S. DoD 2020). 여기서, NTE Tolerance는 방송된 URA index에 대응되는 URA 최댓값의 4.42배로 정의된다. GPS 시스템의 경우 8초의 TTA에 대해 이 확률이
10
−
5
/
S
V
/
h
o
u
r
이하가 유지하도록 시스템을 운용되고 있다 (U.S. DoD 2020).
사용자는 URA를 항법해 산출에 활용할 수 있다. URA는 수신된 항법 신호의 SIS URE 오차에 대한 통계적 정확도를 나타낸다. 따라서, 항법해 계산 시 측정치 가중치 계산에 URA를 활용하여 항법해의 정확도를 향상시킬 수 있다. 또한 민간 항공기의 공항 정밀 접근 및 착륙을 위해 개발 중인 Advanced Receiver Autonomous Integrity Monitoring (ARAIM)의 경우 보호 수준 산출을 위해 URA를 활용한다 (Working Group C 2016). 보호 수준이란 사용자 위치 오차에 대한 높은 수준(ex.
1
−
10
−
7
의 확률)의 신뢰 구간으로 사용자 무결성 정량화를 위한 기법 중 하나이다. 산출된 보호 수준은 시스템에서 허용하는 최대 위치 오차의 크기(alert limit)와 비교된다. 보호 수준이 alert limit보다 작은 경우에 사용자의 무결성이 보장된다고 판단된다.
Wide-Area Differential RNSS (WAD-RNSS)는 광역 보정항법 기술을 지역 위성항법 시스템에 적용한 시스템으로 일반적인 지역 위성항법 서비스와 보정항법 서비스를 모두 제공하는 시스템이다 (Kim et al. 2021). WAD-RNSS는 항법 신호와 보정정보를 방송하는 위성체와 위성의 궤도 결정 및 보정정보 생성을 담당하는 기준국으로 구성된다. 다수의 기준국에서 수집된 측정치 정보를 이용하여 보정정보를 생성하고, 보정항법 서비스 사용자에게 방송함으로써 m급 위치 정확도 제공을 목표로 한다. WAD-RNSS는 항법위성에서 직접 보정신호를 방송하기 때문에, SBAS와 같이 정지궤도 위성을 통해 보정정보를 중계하는 시스템에 비해 사용자는 보다 빠르고 효율적으로 보정정보를 수신하고 적용할 수 있다는 장점이 있다 (Kim et al. 2021, Kim et al. 2024).
본 논문은 한반도 지역의 WAD-RNSS 시스템에 대하여 일반적인 지역항법 서비스 사용자를 위해 URA를 산출하는 것을 목표로 한다. 한반도 지역의 WAD-RNSS 시스템은 Kim et al. (2021)과 같이 4개의 IGSO 위성과 3개의 GEO 위성으로 구성되어 있다고 가정하였다. 승교점 적경이 서로 다른 4개의 IGSO 위성들은 동일한 비대칭 8자 모양의 지상궤적을 공유하여, 한반도에서 항상 최소 2개의 IGSO 위성을 관측할 수 있도록 하였다. 3개의 GEO 위성은 각각 동경 128도, 168도, 88도에 위치시켰다. IGSO와 GEO 위성의 지상궤적 반복성으로 인해 기준국의 위치가 특정 영역으로 제한되며, IGSO의 중심 경도 부근 지역에서는 100% 가시성을 보인다. 이로 인해 해당 지역의 수신기는 IGSO와 GEO 위성으로부터 최소 4개의 RNSS 신호를 관측할 수 있다 (Kim et al. 2019). 기준국의 경우 Park et al. (2023)에서 제안한 국내 6개와 국외 12개의 아시아 태평양 지역에 분포된 기준국을 사용한다고 가정하였다.
본 연구는 위성 항법 메시지 산출에 필요한 궤도 및 시계 결정/예측 데이터를 확보하기 위하여 Park et al. (2023)의 ODTS 필터 기법을 적용하였으며, 해당 필터는 실제 운용 환경의 특성을 모사하는 모델들을 활용한다. 사용된 데이터셋은 GEO 및 IGSO 궤도에 최적화된 확장칼만필터(Extended Kalman Filter)를 기반으로 구축되었고, 궤도 동역학 모델링에는 지구중력퍼텐셜(EGM96, 12×12), 제3체 중력(달 및 태양), 그리고 태양복사압(ECOM, conical shadow 모델)이 반영되었다. 또한, 측정치 생성 시 전리층 지연 오차는 이중 주파수 조합 기법을 통해 효과적으로 제거하였으며, 대류층 지연 오차는 Black 모델을 적용하여 보정되었다. 위성 시계 모델링에는 루비듐 원자시계의 특성을 반영한 Galleani 모델을 활용하였고, 기준국 시계는 세슘 원자시계의 특성을 고려하여 모델링되었다.
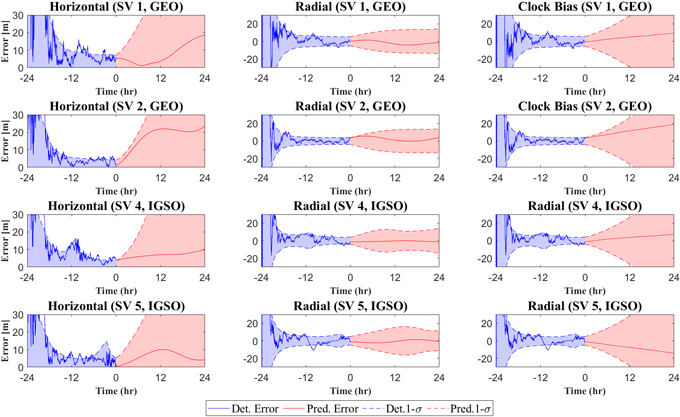
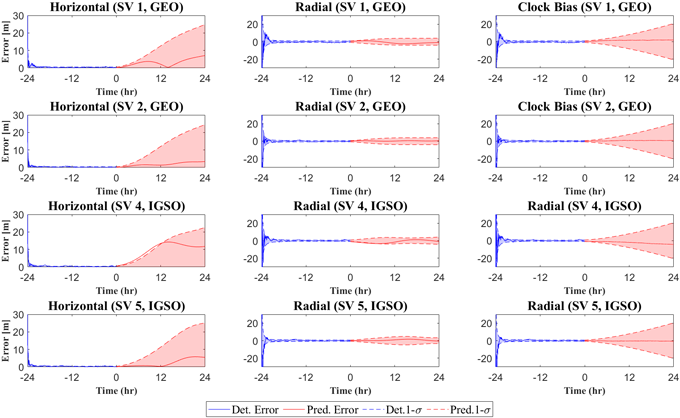
Figs. 1과 2는 각각 국내 기준국만을 사용한 경우와 국내외 기준국을 모두 사용한 경우의 시뮬레이션 기반 궤도/시계 결정 및 예측 결과를 나타낸다. Tables 2와 3은 -6시간, 0시간, 6시간 시점에서의 결과값을 요약하였다. 좌측 열은 위성 궤도의 along track과 cross track의 오차를 나타내는 horizontal 오차를 나타내며, 중앙은 radial track 오차를 나타내고, 우측은 시계 오차를 나타낸다. 상단의 두 행은 GEO 위성에 대한 결과를 나타내고, 하단의 두 열은 IGSO 위성에 대한 결과이다. 각 패널에서 파란색으로 표현된 –24 ~ 0 hour 영역은 궤도/시계 결정 구간을 나타내며, 시뮬레이션을 통해 생성된 측정치로부터 궤도 결정을 수행하였다. 빨간색으로 표현된 0 ~ 24 hour 영역은 궤도/시계 결정 결과로부터 예측된 영역을 나타낸다. 실선은 실제 오차를 나타내며, 점선은 필터의 공분산 행렬로부터 계산된 오차의 표준 편차를 나타낸다. 항법 메시지의 경우 현재의 시점이 아닌, 미래 시점의 위성 궤도 및 시계 정보를 나타내기 때문에, SIS URE 오차는 붉은색 영역에 의한 오차로부터 결정된다. 결과에서 확인할 수 있듯이, 국내 기준국만을 사용한 경우 보다 국내외 기준국을 모두 사용한 경우 궤도/시계 결정 성능이 크게 향상되는 것을 확인할 수 있다.
table
table
이번 장에서는 앞서 생성한 WAD-RNSS 위성의 정밀 궤도력 데이터셋을 활용하여 LNAV URA를 산출하고, Worst User Location (WUL) URE와의 비교를 통해 그 타당성을 검증하였다.
GPS의 기본 항법 메시지인 LNAV는 주기적으로 갱신되는데, 업데이트 시점으로부터 시간이 경과함에 따라 위성의 궤도와 시계 오차가 점진적으로 증가하면서 URE도 함께 증가하게 된다. 따라서 URA는 단순히 업데이트 시점의 URE 표준편차가 아닌, 다음 항법 메시지 갱신 시점까지 예상되는 모든 URE의 표준편차를 보수적으로 바운드할 수 있도록 URE의 예측 표준편차를 기반으로 계산된다. GPS 시스템의 경우, 예측 표준편차를 활용한 LNAV 항법 메시지 URA는 식 (1)과 같이 계산된다 (U.S. DoD 2022).
수식
여기서
σ
R
은 Radial 궤도 오차의 예측 표준편차,
σ
A
은 Along-track 궤도 오차의 예측 표준편차,
σ
C
은 Cross-track 궤도 오차의 예측 표준편차,
σ
t
은 위성 시계 오차의 예측 표준편차,
σ
m
은 모델링 오차의 표준편차이다. 예측 표준편차는 방송된 항법 메시지의 최대 유효 기간 또는 최대 피팅 기간에 해당하는 시점에서 예상되는 표준편차이다 (Rivers 2000). 모델링 오차를 제외한 각 오차의 예측 표준편차는 항법 메시지를 생성하는 지상국의 Orbit Determination and Time Synchronization (ODTS) 필터에서 산출된다. 모델링 오차는 ODTS 필터에서 고려하지 못한 요소에 따른 영향을 반영한다. 예를 들어, 감시국 위치에 따른 영향, 신호 전파 및 동역학 모델 오차 등이 있다 (Rivers 2000).
궤도력 오차는 사용자와 위성을 잇는 시선 벡터 방향으로 투영되는 식으로 URE에 영향을 미치게 된다. radial 오차의 경우, 위성이 사용자의 천정(zenith) 방향에서 오차가 그대로 반영되고 천정 방향에서 멀어질수록 영향이 줄어든다. 반면 along/cross-track 오차의 경우, 천정 방향에서는 URE에 영향을 거의 주지 않으며, 천정에서 멀어질수록 점점 커지다가 사용자가 위성 빔의 가장자리에 있을 때 최대가 된다. URA는 위성 빔폭 내 가장 큰 URE를 갖는 최악(worst-case)의 사용자까지 보장해야 한다. 따라서 모든 방향에서 최악을 가정하여 URA를 보수적으로 계산한다. 이러한 이유로 식 (1)에서 radial 방향 오차의 계수는 1로, along/cross-track 방향 오차 계수는 1/4로 설정된다 (U.S. DoD 2022). 여기서 1/4은 GPS의 빔폭인 13.88도에 sine을 취한 값보다 약간 큰 값이다. 마지막으로 시계 오차는 모든 방향에 동일한 영향을 주기 때문에 계수는 1로 설정된다.
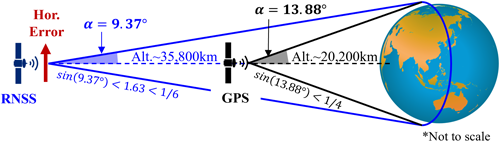
Fig. 3과 같이 한반도 지역 WAD-RNSS의 위성은 약 36,000 km의 고도에서 9.37도의 빔폭을 가진다고 가정하였으며 (Kim et al. 2021), 이는 GPS 위성이 가지는 13.88도의 빔폭보다 좁다 (U.S. DoD 2020). WAD-RNSS 시스템은 한반도 지역이 주요 서비스 지역이기 때문에 실제 빔폭은 9.37도 보다 작지만, 보수적인 분석을 위해 전지구적 범위에 해당하는 9.37도의 빔폭을 사용하였다. GPS와 WAD-RNSS의 빔폭 차이는 LNAV URA 수평 궤도 오차의 투영 계수에 영향을 미친다. GPS의 투영 계수 산출 방식을 기준으로 계산하면 RNSS의 투영 계수는 0.163이며, 이에 본 연구에서는 보수적으로 1/6 (
≈
0.1666)을 채택했다. 결과적으로 한반도 지역 WAD-RNSS의 URA는 식 (2)과 같이 산출된다.
수식
이번 절에서는 WAD-RNSS의 LNAV URA 검증을 위해, 식 (2)를 기반으로 산출한 LNAV URA와 URE를 비교한다. 검증을 위해 위성 빔폭 내에서 최대 크기를 갖는 WUL URE를 산출하여 비교군으로 활용하였다. WUL URE는 해석적 기하(analytical geometric) 방법과 수치적 격자(numerical grid) 방법으로 계산 가능하며, 각 방법은 Heng et al. (2012)의 그림을 재구성하여 Fig. 4에 도시하였다. 해석적 기하 방법은 위성 빔폭의 가장자리에 위치한 사용자를 최악의 경우로 가정하여 위성의 위치 오차를 빔폭 가장자리 방향으로 투영하여 WUL URE를 기하학적으로 산출한다. 반면 수치적 격자 방법은 빔폭 내 모든 지점의 URE를 계산하여 WUL URE를 도출한다. 이 방법은 격자 크기에 따라 계산 속도와 정확도가 변할 수 있다.
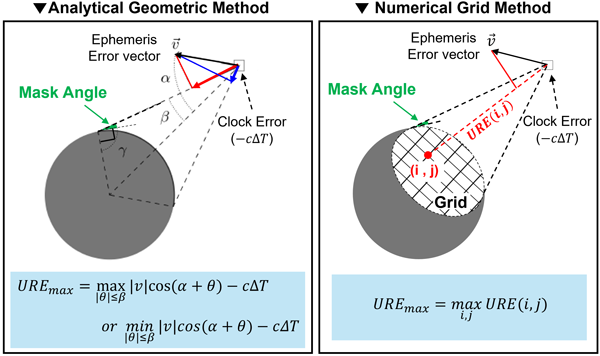
Fig. 5는 IGSO 위성(SV 4)과 GEO 위성(SV 1)에 대한 LNAV URA와 WUL URE의 비교 결과를 보여준다. URA 계산에서는 가장 보수적인 검증을 위해 모델링 오차를 고려하지 않았다(
σ
m
=
0
m
). Fig. 5에서 확인할 수 있듯이, 모델링 오차를 고려하지 않은 최소 URA 값으로도 모든 예측 구간에서 WUL URE를 보수적으로 바운드하고 있다. 이는 WAD-RNSS의 위성 빔폭 내 모든 사용자가 URA 값을 신뢰할 수 있음을 의미한다. 실제 운용 환경에서는 모델링 오차가 존재하며, 이를 고려할 경우 URA 값은 증가할 것이다. 또한 Fig. 5에 따르면 해석적 기하 방법과 수치적 격자 방법으로 계산된 WUL URE는 거의 동일한 값을 보인다. 이는 수치적 격자 방법도 기하 방법과 마찬가지로 최악 위치를 빔폭의 가장자리로 도출했기 때문이다. 결과적으로, 본 연구에서 산출된 LNAV URA가 WUL URE를 보수적으로 바운드하므로 WAD-RNSS의 빔폭 내 모든 사용자에게 적용 가능할 것으로 판단된다.
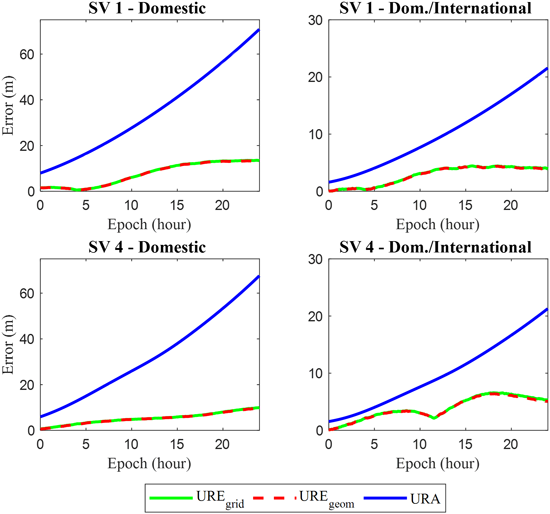
Fig. 6은 이 연구에서 생성한 궤도 및 시계 오차 데이터셋을 기반으로 식 (2)를 통해 산출된 두 IGSO 위성(SV 4, SV 5)의 LNAV URA를 나타낸다. Fig. 6에서 각 패널은 서로 각 IGSO 위성에 대해 국내 기지국만 활용한 경우와 국내외 기지국을 모두 활용한 경우에 대한 URA 산출 결과를 보여준다.
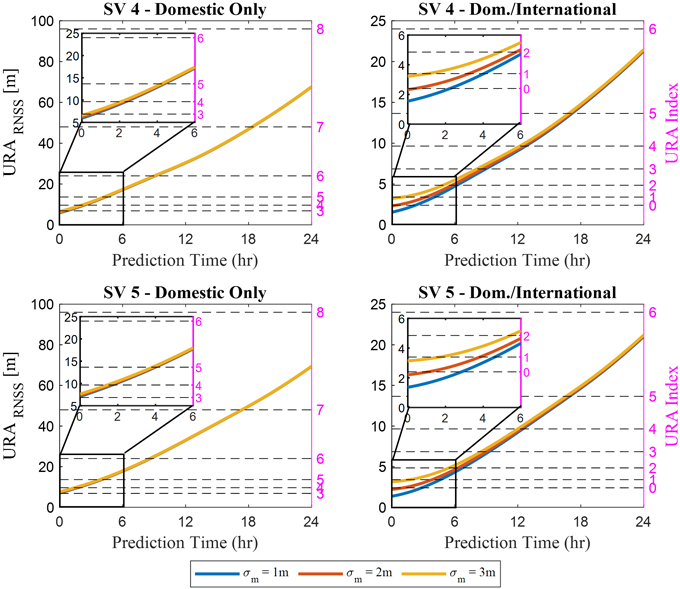
모델링 오차는 궤도 및 시계 오차와 달리 ODTS 필터에서 고려하지 못한 요소들의 영향을 반영하는 오차이다. 2000년대 이전에는 모델링 오차의 표준편차를 3 m로 보수적으로 설정하였으나, Rivers (2000)는 이 오차 수준이 지나치게 보수적이라 판단하여 모델링 오차를 완화하기 위한 연구를 수행하였다. 본 연구에서는 모델링 오차의 최대값을 보수적으로 3 m로 설정하고, 1 m, 2 m, 3 m 각각의 경우에 대하여 URA 산출 시뮬레이션을 수행하였다.
예측 표준편차를 기반으로 산출된 URA는 2.2절에서 설명한 바와 같이 단일 인덱스 형태로 변환되어 사용자에게 방송된다. 따라서 본 연구에서도 산출된 URA를 Table 1의 기준에 따라 인덱싱하였다. Fig. 6의 각 패널에서 우측 y축은 URA index를 나타내며, 각 인덱스는 Table 1에 제시된 URA 범위의 최대값을 의미한다. 각 시점의 URA 값에 대해 보수적으로 바운드하는 URA 인덱스의 최소값으로 변환하였다. Table 4에 LNAV 업데이트 주기를 15분에서 6시간(360분)까지 고려한 각 케이스별 URA 인덱싱 결과를 정리하였다.
table
URA 산출에 사용되는 예측 표준편차는 Figs. 1과 2에서 보듯이 예측 시간이 길어질수록 증가하며, 이에 따라 URA도 증가하는 경향을 보였다. 두 IGSO 위성의 URA는 모든 경우에서 유사한 경향을 나타냈다. 국내 기지국만 활용한 경우, URA는 24시간 동안 3 m에서 70 m까지 급격히 증가했으며, URA 인덱스는 6시간 동안 위성에 따라 3 또는 4에서 6까지 증가했다. 전체 구간에서 궤도 및 시계 오차만으로도 URA가 3 m 이상으로 산출되어, 모델링 오차의 영향이 미미한 것으로 나타났다.
국내외 기지국을 모두 활용한 경우, 24시간 경과 후에도 URA 수준이 20 m로 유지되어 국내 기지국만 활용한 경우에 비해 크게 완화되었다. 이는 Figs. 1과 2에서 보듯이 기지국의 수와 기하학적 분포가 개선됨에 따라 위성의 궤도 및 시계 추정 성능이 향상되었기 때문이다 (Kim 2007). 그 결과, 예측 시간이 30분 이하인 구간에서는 모델링 오차가 2 m 이하일 때 URA 인덱스가 0까지 감소하였다. 또한 산출된 URA의 크기가 국내 기지국만 활용한 경우보다 낮아, 초기 예측 시간에서 모델링 오차에 따른 URA 인덱스 변화가 관찰되었다.
현재 GPS는 대부분의 경우 URA index를 최소값인 0으로 방송하며 (Walter & Blanch 2015), 항법 메시지의 유효 기간은 4시간이다. 국내외 기지국을 모두 활용하는 경우 4시간 이내에서 URA index를 0으로 설정하기 위해서는 모델링 오차가 1 m 미만이어야 한다. 단기 예측 구간에서는 URA가 주로 모델링 오차에 의해 결정되므로, 예측 구간이 짧을수록 모델링 오차를 감소시키는 것이 URA 저감에 효과적이다.
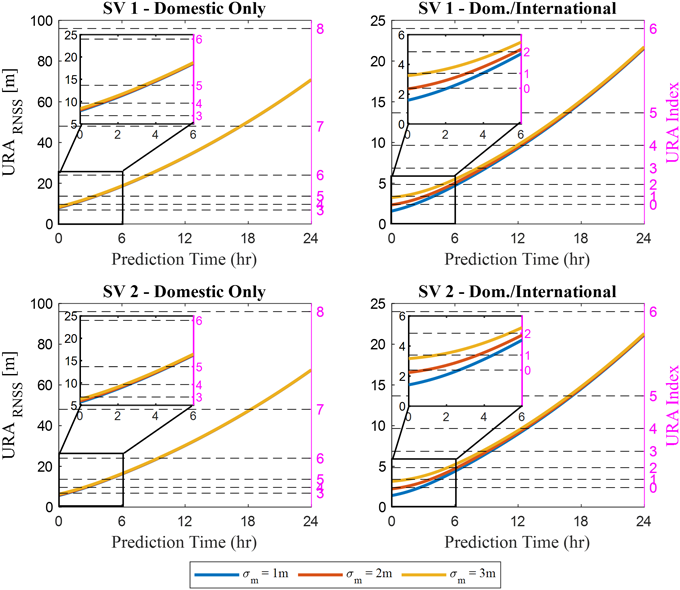
Fig. 7은 두 GEO 위성(SV 1, SV 2)의 LNAV URA 산출 결과를 나타낸다. IGSO의 경우와 마찬가지로 국내외 기지국을 사용한 경우가 국내 기지국만 사용한 경우보다 더 낮은 URA 값을 보인다. 또한, 예측 구간이 짧을수록 모델링 오차의 상대적 영향이 증가한다. LNAV 업데이트 주기가 6시간 이내인 케이스에 대한 GEO의 URA index는 Table 5에 정리하였다.
테이블
IGSO와 GEO 위성의 URA 결과가 유사한 경향을 보이는 것은 Figs. 1과 2에 제시된 예측 표준편차에 큰 차이가 없는 것에서 기인한다. Figs. 1과 2에서 보듯이, 예측 표준편차는 radial 궤도 오차가 가장 작고, 시계 오차가 그 다음으로 작으며, 수평 궤도 오차가 가장 크게 나타났다. 수평 궤도 오차는 투영 계수의 영향을 받아 감소하므로, LNAV URA 결과는 주로 시계 오차와 모델링 오차에 의해 결정되었다.
본 연구에서는 GPS의 LNAV URA 산출식으로부터 한반도 지역 WAD-RNSS 위성 궤도 특성을 고려한 URA 산출식을 도출하였다. ODTS 시뮬레이션을 통해 생성된 위성 궤도 및 시계 오차의 예측 표준편차 데이터로부터 URA를 산출하였으며, WUL URE와 비교하여 산출된 URA가 보수적으로 URE를 바운드하는 것을 확인하였다. 국내 기지국만 활용한 경우와 국내외 기지국을 모두 활용한 경우에 대해 24시간 예측 시간 동안의 URA를 산출하였고, LNAV 업데이트 주기에 따른 LNAV URA index를 도출하였다. 분석 결과 LNAV 업데이트 주기가 짧을수록 모델링 오차가 주요 변수로 작용하고, 주기가 길어질수록 시계 오차의 영향이 증가하는 경향을 보임을 확인하였다. 향후 연구에서는 Civil Navigation 항법 메시지 포맷의 URA 도출 및 분석을 수행하고자 한다.
이 논문은 2023년 정부(방위사업청)의 재원으로 국방과학연구소의 지원을 받아 수행된 연구임 (UD230018TD).
Conceptualization, J. Kim & M. Kim; methodology, J. Kim & M. Kim; software, J. Kim & D. Kim; validation, M. Kim, D. Min, D. Kim & J. Lee; formal analysis, J. Kim, M. Kim & D. Min; investigation, J. Kim, M. Kim & D. Min; resources, J. Kim, M. Kim & D. Min; data curation, J. Kim & D. Kim; writing—original draft preparation, J. Kim, M. Kim & D. Min; writing—review and editing, J. Kim, M. Kim, D. Min & D. Kim, visualization, J. Kim & D. Kim. supervision, J. Lee; project administration, J. Lee; funding acquisition, J. Lee.
The authors declare no conflict of interest.
Ahn, H., Song, C., Yu, J., & Kim, T. 2020, A study on strategy of securing international resources for establishment of the Korean Positioning System, STEPI Final Report
Cabinet Office 2024, Interface Specification, IS-QZSSPNT-006, available from: https://qzss.go.jp/en/ technical/ps-is-qzss/ps-is-qzss.html
Galluzzo, G., Wallner, S., Pericacho, J. G., Criado, O., García, C., et al. 2020, Prototyping of Galileo URA Determination with TGVF and Extended Galileo Performance Characterisation for SoL Applications, Proceedings of 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), Virtual, 22-25 Sep 2020. https://doi. org/10.33012/2020.17763
Heng, N., Gao, G., Walter, T., & Enge, P. 2012, GPS Signalin-Space Integrity performance evolution in the last decade, IEEE Transactions on Aerospace and Electronic Systems, 48, 2932-2946. https://doi.org/10.1109/ taes.2012.6324670
Joo, J. & Heo, M. 2020, Korean Positioning System development plan, in Proceedings 2020 IPNT Conference, Yeosu, Korea, 11-13 Nov 2020, pp.29-30. https:// ipnt.or.kr/2020proc/110
Kim, D. 2007, A study on correction generation algorithms for wide area differential GNSS, Ph.D. Dissertation, Seoul National University, Seoul, Korea.
Kim, D., So, H., & Park, J. 2021, Performance Analysis of WideArea Differential Positioning based on Regional Navigation Satellite System, Journal of Positioning, Navigation, and Timing, 10, 35-42. https://doi.org/10.11003/ jpnt.2021.10.1.35
Kim, G., Oh, H., Park, C., & Seo, S. 2019, Real-Time Orbit Determination of Korean Navigation Satellite System based on Multi-GNSS Precise Point Positioning, in Proceeding of ISGNSS 2018, Bali, Indonesia, 21-23 Nov 2018. https://doi.org/10.1051/e3sconf/20199403008
Kim, Y., Kim, I., & Kim, D. 2024, Study on the Integrity Alert Concept of Wide-Area Differential Regional Navigation Satellite System (WAD-RNSS), in Proceeding of 2024 IPNT Conference, Jeju, Korea, 6-8 Nov 2024, pp.69-72. https://ipnt.or.kr/2024proc/38
Park, J., Kim, B., Kee, C., & Kim, D. 2023, Performance Analysis of Real-time Orbit Determination and Prediction for Navigation Message of Regional Navigation Satellite System, Journal of Positioning, Navigation, and Timing, 12, 167-176. https://doi.org/10.11003/JPNT.2023.12.2.167
Rivers, M. 2000, The 2 SOPS User Range Accuracy (URA) improvement and Broadcast Inter-Frequency Bias (TGD) updates, Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, 19-22 Sep 2000, pp.2551-2555. https://www.ion. org/publications/abstract.cfm?articleID=1681
U.S. Department of Defense 2020, Global Positioning System Standard Positioning Service Performance Standard, 5th, available from: https://www.gps.gov/technical/ps/
U.S. Department of Defense 2022, Interface Control Documents, IS-GPS-200N, available from: https:// www.gps.gov/technical/icwg/
Walter, T. & Blanch, J. 2015, KEYNOTE – Characterization of GNSS Clock and Ephemeris Errors to Support ARAIM, Proceedings of the ION 2015 Pacific PNT Meeting, Honolulu, Hawaii, 20-23 Apr 2015, pp.920931. https://www.ion.org/publications/abstract. cfm?articleID=12769
Working Group C 2016, ARAIM Technical Subgroup, Milestone 3 Report, available from: https://www. gps.gov/policy/cooperation/europe/2016/workinggroup-c/